Sin embargo, resulta complicado configurar estos complejos circuitos integrados y evaluar el rendimiento potencial del sistema basándose únicamente en las hojas de datos o las simulaciones. El proceso puede ser largo y costoso, y puede generar incertidumbres en el momento de la implementación. La mejor forma de llevar a cabo el desarrollo es en paralelo con las fases de diseño del sistema, disposición y desarrollo de software, utilizando placas de evaluación.
Este artículo destaca algunos de los retos a los que se enfrentan los diseñadores cuando utilizan circuitos integrados de control de movimiento y el papel de las placas de evaluación para abordarlos. A continuación, presenta circuitos integrados ejemplares y placas de evaluación asociadas de Analog Devices que acortan el tiempo de comercialización al permitir una evaluación temprana y realista, al tiempo que reducen las incertidumbres de hardware y software.
Resumen de los requisitos de los circuitos integrados de control de movimiento
Los circuitos integrados de control de movimiento proporcionan la inteligencia necesaria para controlar el motor y sus dispositivos de potencia internos, como los MOSFET que accionan los devanados del motor. Tanto el motor como los MOSFET requieren una gestión cuidadosa para lograr un rendimiento, una trayectoria, un perfil de movimiento y una eficiencia óptimos en los modos de funcionamiento estáticos y dinámicos y en las condiciones de carga, así como para manejar perturbaciones, transitorios y fallos.
Para ayudar a abordar estos retos, los proveedores de circuitos integrados de controladores ofrecen placas de evaluación. Estas simplifican la configuración, la optimización y la evaluación del rendimiento del hardware y el software, ya que permiten realizar pruebas de hardware en bucle (HITL) con un motor real y una carga real en condiciones variables. También garantizan que la disposición física del circuito integrado y los circuitos circundantes se establezca correctamente en lo que respecta a la distribución de la energía, los parásitos, la conectividad y los formatos de entrada/salida (E/S), los conectores físicos y mucho más. Con estas placas, disponibles como placas de gama media, placas de conexión básicas (BOB) o soluciones modulares, los diseñadores pueden evaluar diferentes ajustes, configuraciones y opciones para determinar cuáles son los más adecuados para la aplicación.
CI de control de motores y placas asociadas
Un buen ejemplo de CI de control de motores es el TMC5130A-TA-T de la familia TMC5130 de Analog Devices. Se trata de un controlador y driver de motor paso a paso de alto rendimiento con interfaces de comunicación serie que incluye un generador de rampa flexible para el posicionamiento automático del objetivo.
Mediante un sofisticado algoritmo chopper StealthChop, el controlador garantiza un funcionamiento prácticamente silencioso, la máxima eficiencia y un par motor óptimo. El TMC5130 ofrece varias mejoras únicas gracias a la integración del controlador y el controlador en un sistema en chip (SoC). Por ejemplo, el generador de rampa SixPoint del TMC5130 utiliza las funciones DcStep, CoolStep y StallGuard2 para optimizar automáticamente cada movimiento del motor.
Para ayudar a los diseñadores a empezar a utilizar el TMC5130, el sistema de placa TMC5130-EVAL (Figura 1) proporciona una cómoda plataforma de hardware y una herramienta de software fácil de usar para la evaluación. El sistema de placa consta de tres partes: un puente de conexión de placa base a un ordenador (izquierda), una placa conector que incluye varios puntos de prueba (centro) y la placa TMC5130-EVAL (derecha).

Figura 1: La placa de evaluación TMC5130-EVAL (derecha) y la carga del motor (extremo derecho) se configuran utilizando un puente USB de conexión a la placa base para conectarse a un PC (izquierda) y una placa conector con puntos de prueba (centro). (Fuente de la imagen: Analog Devices)
Para los diseñadores que prefieren desarrollar más circuitos propios en torno a un núcleo basado en TMC5130, Analog Devices ofrece la placa de conexión TMC5130A-BOB (figura 2, arriba). Esta placa proporciona las interconexiones básicas necesarias para el funcionamiento y se controla a través de una interfaz SPI. Su diagrama esquemático (figura 2, abajo) muestra los circuitos minimalistas que proporciona para habilitar un IC TMC5130 funcional.
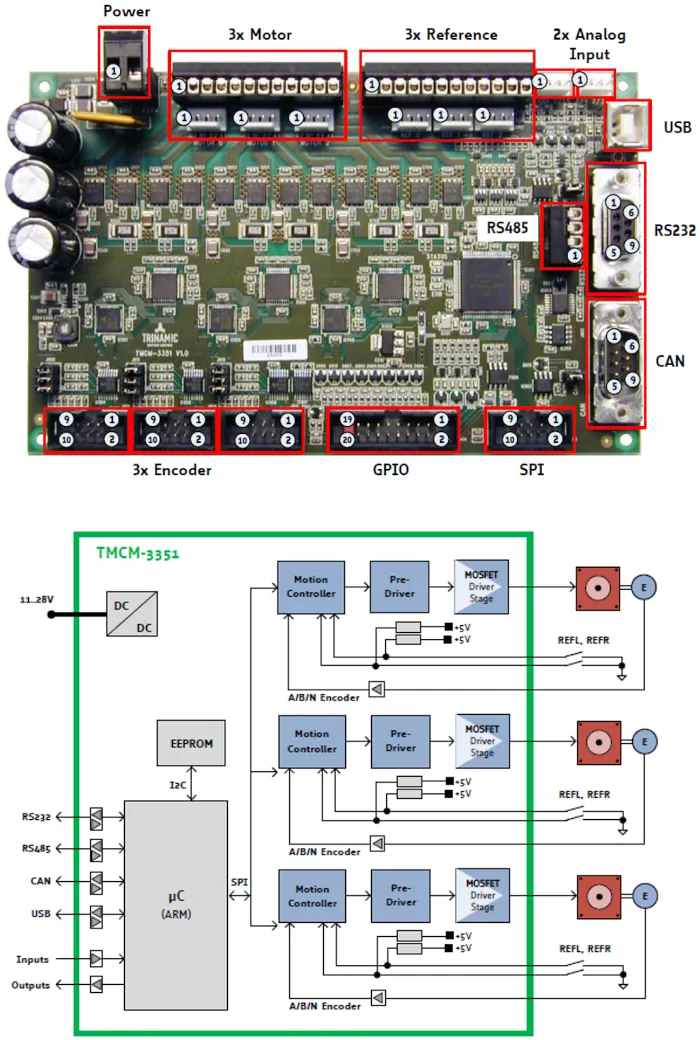
Figura 2: La TMC5130A-BOB (arriba) proporciona un enfoque de evaluación básico, con puntos de conexión a lo largo de sus bordes en lugar de conectores discretos; su diagrama esquemático (abajo) muestra los circuitos mínimos necesarios para habilitar un IC TMC5130 funcional. (Fuente de la imagen: Analog Devices)
El kit de evaluación TMC5240-EVAL se basa en la plataforma probada TMC5130-EVAL para optimizar la evaluación de motores paso a paso de última generación, integrando puentes H de 36 V, detección de corriente sin pérdidas y control de movimiento avanzado con un generador de rampa optimizado para sacudidas y un funcionamiento StealthChop2™ ultrasilencioso, lo que permite una puesta en marcha más rápida, un ajuste más sencillo y una validación más eficiente del rendimiento suave y preciso del motor.
El control avanzado elimina la necesidad de sensores de retroalimentación
El control orientado al campo (FOC), también conocido como control vectorial, es un enfoque cada vez más popular para controlar una amplia gama de motores, ya que elimina, en muchos casos, la necesidad de sensores de retroalimentación, como codificadores o sensores de efecto Hall, y sus costes y tamaño asociados. La principal diferencia entre las técnicas FOC y no FOC es que las FOC requieren cálculos de alta precisión y matemáticas matriciales que deben realizarse en tiempo real.
El controlador de motor CI TMC4671-LA de Analog Devices está específicamente diseñado para FOC con sus algoritmos integrados y un motor dedicado para los complejos cálculos necesarios para ejecutarlos. Este servocontrolador para motores de CC, CC sin escobillas (BLDC) y motores paso a paso proporciona control de par mediante FOC, junto con velocidad y posición mediante control en cascada.
El TMC4671-A admite enlaces SPI y UART para la comunicación básica con una unidad microcontroladora (MCU) de supervisión de gama baja. Todas las funciones de control se implementan en hardware, con ADC integrados, interfaces de sensores de posición para retroalimentación opcional, interpoladores de posición y mucho más, lo que proporciona un controlador servo totalmente funcional para una amplia gama de aplicaciones servo.
La placa TMC4671-EVAL (Figura 3) para el TMC4671-A simplifica la configuración de los parámetros FOC necesarios y la evaluación del rendimiento del motor bajo este avanzado esquema de control. El diseñador conecta el TMC4671-EVAL con el puente de conexión, la placa base asociada y una etapa de potencia independiente. Esta configuración permite una fácil configuración de los controladores proporcionales-integrales (PI) y los esquemas de retroalimentación, y admite el funcionamiento del motor en los modos de control estándar de posición, velocidad y par.
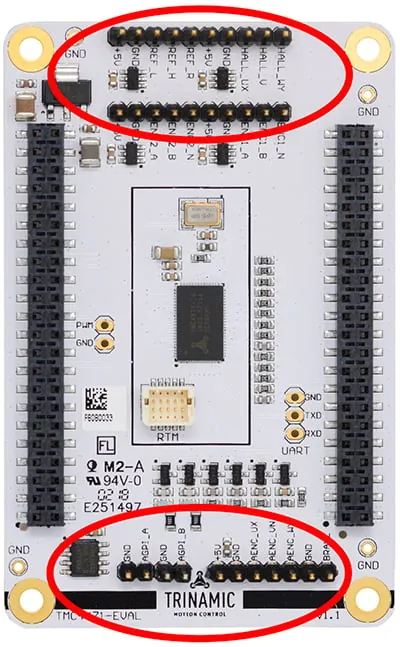
Figura 3: La placa TMC4671-EVAL cuenta con dos filas de conectores para E/S de señal y alimentación. (Fuente de la imagen: Analog Devices, modificada por el autor)
Los conectores de pines de la parte superior de la TMC4671-EVAL sirven para conectar codificadores digitales, señales de sensores digitales de efecto Hall e interruptores de referencia. Los conectores de pines de la parte inferior de la placa sirven para señales analógicas de sensores de efecto Hall o un codificador de seno/coseno.
Los diseñadores que prefieran construir su propio circuito de evaluación en torno a un núcleo de controlador de motor funcional pueden utilizar la placa de conexión TMC4671-BOB (figura 4, arriba). Ofrece interfaces SPI y UART para la comunicación y la configuración, junto con una interfaz de monitorización en tiempo real (RTMI) para la depuración y el ajuste en directo a través del adaptador USB-2-RTMI_V20 con aislamiento galvánico (óhmico) (Figura 4, parte inferior).

Figura 4: La TMC4671-BOB (parte superior) proporciona acceso directo al TMC4671, así como interfaces SPI y UART; el adaptador USB-2-RTMI_V20 asociado (parte inferior) es una interfaz USB con aislamiento galvánico. (Fuente de la imagen: Analog Devices)
Este adaptador ofrece conversión de interfaz USB para la supervisión en tiempo real del controlador IC FOC TMC4671-LA. El convertidor de interfaz puente USB de alta velocidad a SPI se alimenta por USB y proporciona protección básica contra descargas electrostáticas (ESD), así como aislamiento galvánico entre los conectores USB y RTMI para evitar problemas de seguridad y bucles de tierra.
Kit de evaluación todo en uno
Por último, en algunos casos, la placa de evaluación completa de Analog Devices puede servir como producto desplegable. Por ejemplo, el módulo TMCM-3351-TMCL (figura 5, arriba) es una placa controladora/controladora de motor paso a paso de tres ejes para tres motores paso a paso bipolares de dos fases. Incluye todos los componentes activos y pasivos necesarios, incluidos los controladores de potencia MOSFET y los conectores (figura 5, abajo).
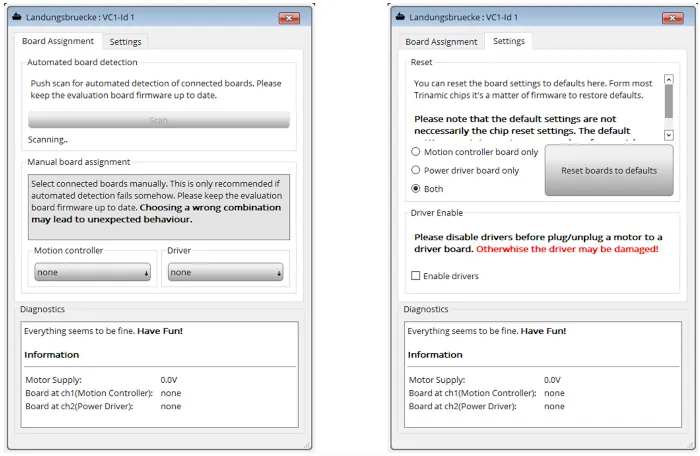
Figura 5: Los conectores estándar de señal, alimentación y E/S del módulo TMCM-3351-TMCL (parte superior) agilizan la configuración y el uso; el IC y su módulo pueden manejar tres motores simultáneamente (parte inferior) para el control de movimiento de tres ejes. (Fuente de la imagen: Analog Devices)
Este módulo, funcionalmente completo, admite rampas lineales y en forma de S para el funcionamiento en bucle cerrado con codificadores opcionales para cada uno de los tres ejes. El TMCM-3351-TMCL también ofrece numerosas entradas y salidas digitales y analógicas de uso general. Para las comunicaciones, hay disponibles interfaces serie RS-485, CAN bus, USB y RS-232.
Herramientas de software fundamentales para la productividad de la placa de evaluación
Las placas de evaluación son compatibles con el Trinamic Motion Control Language-Integrated Development Environment (TMCL-IDE). Esta interfaz gráfica de usuario (GUI) proporciona herramientas para configurar fácilmente los parámetros, visualizar los datos en tiempo real y desarrollar y depurar aplicaciones independientes.
Autor: Bill Schweber. Contributed By DigiKey's North American Editors. Digikey
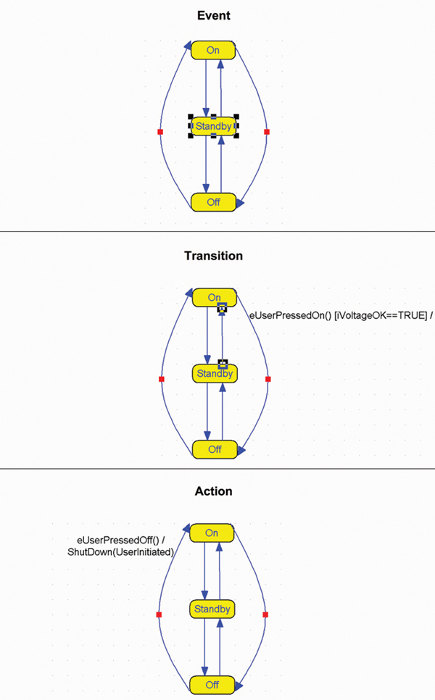
El TMCL-IDE muestra varios cuadros de diálogo para tareas de diagnóstico (Figura 6) e incluye una descripción general del controlador de movimiento y los chips controladores conectados. Esta ventana de descripción general aparece inmediatamente después de conectar el kit de evaluación por primera vez. La ventana muestra el estado actual de las conexiones, mientras que la segunda pestaña del cuadro de diálogo permite a los usuarios seleccionar los ajustes básicos o restablecer el módulo a los valores predeterminados de fábrica.
Figura 6: La GUI del TMCL-IDE simplifica la instalación, la configuración y el análisis del rendimiento de los distintos circuitos integrados de control de motores bajo cargas reales cuando se utiliza con las placas de evaluación asociadas. (Fuente de la imagen: Analog Devices).
Conclusión
Los modernos circuitos integrados de control de movimiento y sus algoritmos son muy sofisticados y deben ofrecer un rendimiento excepcional en múltiples criterios de motor, incluyendo precisión, fiabilidad y eficiencia. Mediante el uso de placas de evaluación y software de apoyo, los diseñadores pueden ajustar estos controladores en paralelo con el resto del esfuerzo de diseño para ofrecer un rendimiento optimizado del motor a pesar de las variaciones de carga y los transitorios.