Para comprobar el ancho de banda y la estabilidad del bucle de realimentación de la fuente de alimentación, se utilizan ampliamente los diagramas de Bode del bucle, que proporcionan valores precisos y cuantificados del rendimiento del bucle. En este artículo se revisan los conceptos fundamentales y la importancia de la estabilidad del bucle, desde el criterio del diagrama de Nyquist hasta los diagramas de Bode. A continuación, se ofrecen ejemplos de diagramas de Bode y herramientas, junto con mediciones de laboratorio para generar diagramas de Bode, con el fin de demostrar la mejor forma de evaluar la estabilidad del bucle. También se explican consideraciones prácticas para la configuración de la medición del bucle.
Revisión de los conceptos básicos del bucle de realimentación: criterio de estabilidad y diagrama de Bode
Diagrama de Nyquist y criterio de Nyquist
Para evaluar la estabilidad de un sistema de bucle de realimentación negativa lineal, un concepto básico y original es el criterio de Nyquist, que utiliza el diagrama de Nyquist. Recibe su nombre de Harry Nyquist, un ingeniero de Bell Telephone Laboratories que publicó un artículo clásico sobre la estabilidad de los amplificadores de realimentación en 1932. Su criterio de estabilidad de Nyquist se encuentra ahora en todos los libros de texto sobre teoría del control de realimentación.
Suponiendo que la función de transferencia de ganancia en bucle abierto de un sistema de realimentación es T(s), su diagrama de Nyquist es un gráfico de T(s) con s = jɯ = j2πf en el plano complejo de Re(T(s)) e IM(T(s)), a medida que la frecuencia ɯ se barre como un parámetro que va de 0 a infinito. El gráfico se puede describir utilizando coordenadas polares, donde la magnitud del bucle es la coordenada radial y la fase de la función de transferencia es la coordenada angular correspondiente desde el punto (0, 0). La estabilidad del bucle se determina observando el número de circunferencias del punto (-1, 0) en este gráfico. Para una fuente de alimentación de bucle de realimentación analógica típica, su función de transferencia de bucle abierto es normalmente estable (es decir, sin RHP). En este caso, el sistema de bucle cerrado es estable si el gráfico T(jɯ) no rodea el punto (-1, 0) en el sentido de las agujas del reloj a medida que aumenta la frecuencia, como se muestra en la figura 1. Por otro lado, si el gráfico de Nyquist T(jɯ) rodea el punto (-1,0) en el sentido de las agujas del reloj a medida que aumenta la frecuencia, como se muestra en la figura 4, el sistema es inestable.

Figura 1. Gráfico de Nyquist típico de un sistema lineal de realimentación negativa estable (fuente de alimentación).
Para tener cierto margen de estabilidad, es importante mantener el gráfico T(jɯ) alejado del punto crítico (-1, 0). Por lo tanto, utilizando el criterio de Nyquist y el gráfico, el margen de estabilidad del sistema de realimentación de la fuente de alimentación viene determinado por la distancia del gráfico T(jɯ) al punto (-1, 0). En sentido estricto, la distancia mínima entre el punto (-1, 0) y el gráfico T(jɯ) debe utilizarse para cuantificar el margen de estabilidad, tal y como se representa con el valor dm en la figura 2. Sin embargo, para simplificar la tarea del análisis del dominio de la frecuencia (utilizando gráficos de Bode), el margen de fase (PM) se define como el ángulo de fase correspondiente al punto en el que el gráfico T(jɯ) se cruza con la circunferencia unitaria (|T(jɯ)| = 1, o 0 dB), y el margen de ganancia (GM) se determina por el valor |T(jɯ)|, donde el gráfico T(jɯ) se cruza con el eje real (es decir, fase = –180°), como se muestra en la figura 2.
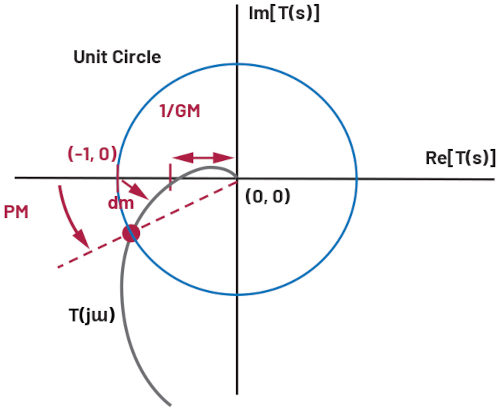
Figura 2. Márgenes de estabilidad (margen de fase (PM) y margen de ganancia (GM)) en el gráfico de Nyquist.
Gráficos de Bode y criterio de estabilidad
Aunque el gráfico de Nyquist proporciona un criterio de estabilidad preciso de un sistema de realimentación, no muestra visualmente los valores de frecuencia en el gráfico T(jɯ). No es fácil utilizar este gráfico para el análisis de funciones de transferencia y diseños con polos y ceros en el dominio de la frecuencia. En la década de 1930, otro ingeniero de Bell Labs, Hendrik Wade Bode, ideó un método sencillo para representar gráficamente los gráficos de ganancia y desplazamiento de fase. Se conocen como un par de gráficos de Bode, que incluyen el gráfico de ganancia y el gráfico de fase correspondientes en función de la frecuencia. De una manera más intuitiva, un gráfico de Nyquist se puede redibujar con un par de gráficos de Bode, como se muestra en la Figura 3. El gráfico de magnitud de Bode es el gráfico de la función |T(s = jɯ)| del valor de frecuencia ɯ = 2πf. Aquí, el eje horizontal x de la frecuencia es logarítmico. La magnitud (ganancia) se expresa en decibelios, es decir, se traza un valor para la magnitud |T| en el eje a 20log10|T|. El gráfico de fase de Bode es el gráfico de la fase, expresada comúnmente en grados, de la función de transferencia arg(T(s = jɯ)) del valor de frecuencia ɯ. El valor de la fase se traza en un eje vertical lineal. Utilizando los gráficos de Bode, la frecuencia a la que el gráfico de ganancia alcanza 0 dB (eje x) se define como el ancho de banda de bucle cerrado fBW del sistema. Este es el mismo punto en el que el gráfico de Nyquist T(jɯ) cruza la circunferencia unitaria. Por lo tanto, en fBW, la diferencia de fase entre el gráfico de fase y –180° es el margen de estabilidad de fase (PM) que se muestra en el gráfico de Nyquist, es decir, PM = 180 + arg(T(jɯ)) en fBW. Tenga en cuenta que PM ≤ 0 indica un sistema inestable. A medida que aumenta la frecuencia, la fase de la fuente de alimentación puede disminuir aún más. En el punto en el que la fase alcanza –180°, es el mismo punto en el que el gráfico de Nyquist T(jɯ) se cruza con el eje Re, donde el margen de ganancia (GM) se define por 1/|T(jɯ)|. En resumen, el criterio de estabilidad de Bode es el criterio de Nyquist simplificado representado en los gráficos de Bode.
Como ejemplo, la figura 4 muestra un sistema inestable típico y sus gráficos de Nyquist y Bode correspondientes. En su gráfico de Nyquist, la trayectoria del bucle T(jɯ) rodea el punto (-1, 0) en el sentido de las agujas del reloj a medida que aumenta la frecuencia. El gráfico se cruza con el eje x incluso antes de que la magnitud |T(jw)|, es decir, la distancia al punto (0, 0), caiga a 1. El gráfico T(jɯ) se cruza con la circunferencia unitaria con un ángulo de fase negativo. En consecuencia, en sus gráficos de Bode, el gráfico de fase alcanza –180°, mientras que el gráfico de ganancia sigue siendo superior a 0 dB. En la frecuencia de cruce fBW, el valor de fase es inferior a –180°. A partir de los gráficos de Bode, es fácil deducir que se trata de un sistema inestable con PM < 0°.
Otra ventaja importante de los gráficos de Bode es la representación muy visible de una función de transferencia y sus polos y ceros, con sus ubicaciones exactas en frecuencia y sus efectos en los gráficos de ganancia y fase. Esto convierte el diseño de la compensación de bucle en un proceso de ingeniería estándar.
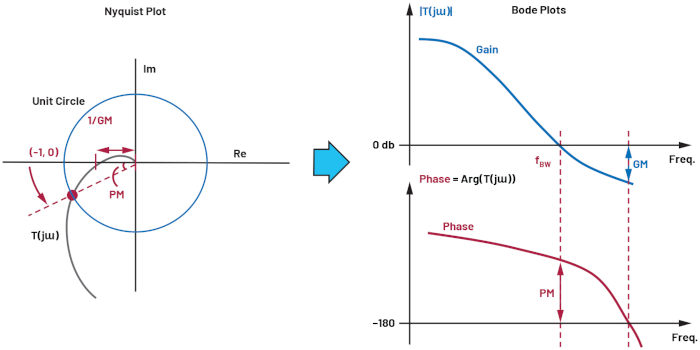
Figura 3. Un sistema estable típico: gráfico de Nyquist a gráficos de Bode y ancho de banda, margen de fase (PM) y margen de ganancia (GM) correspondientes.

Figura 4. Gráfico de Nyquist de un sistema inestable típico y sus correspondientes gráficos de Bode.

Figura 5. Un sistema conceptual con buen PM y GM, pero con riesgo de inestabilidad.
Por último, aunque los márgenes de ganancia y fase de la gráfica de Bode son medidas de robustez clásicas que se han utilizado durante mucho tiempo en el diseño de sistemas de control, tenga en cuenta que la interpretación de los márgenes de estabilidad de la gráfica de Bode puede ser incorrecta o inexacta si hay varios puntos (frecuencias) en los que la gráfica de Nyquist cruza o se aproxima al círculo unitario (es decir, la gráfica de ganancia de Bode cruza 0 dB). Por ejemplo, la figura 5 muestra un ejemplo de un sistema con buenos márgenes de fase y ganancia en los diagramas de Bode. Sin embargo, el diagrama de Nyquist muestra que está peligrosamente cerca del punto (-1, 0), con riesgo de inestabilidad. En este ejemplo, el sistema no es robusto. Por lo tanto, incluso en los diagramas de Bode, es importante observar los diagramas completos en lugar de centrarse únicamente en dos puntos de PM (en fBW) y GM.
En conclusión, el método del diagrama de Bode ha resultado fácil y eficaz para el análisis de la estabilidad de los bucles. Por ello, se ha utilizado ampliamente en sistemas de realimentación lineal, incluidas las fuentes de alimentación. A los ingenieros les encanta la simplicidad (¿a quién no?) de utilizar el margen de fase para determinar y cuantificar la estabilidad del bucle. Es posible que muchos ingenieros de campo hayan olvidado el concepto original de Nyquist de los libros de texto escolares. Es necesario señalar que los conceptos del criterio de Nyquist y el gráfico de Nyquist siguen siendo útiles, especialmente cuando hay gráficos de Bode inusuales y confusos.
Estabilidad del bucle de la fuente de alimentación
Hay dos tipos principales de fuentes de alimentación: fuentes de alimentación de modo lineal y fuentes de alimentación conmutadas (SMPS). Las fuentes de alimentación lineales son relativamente sencillas. Su red de compensación suele estar integrada en un circuito integrado, por lo que los usuarios solo tienen que seguir las instrucciones de la hoja de datos sobre los requisitos mínimos y máximos de capacitancia de salida. Las SMPS suelen tener una mayor eficiencia y, por lo tanto, un nivel de potencia más alto que las fuentes de alimentación lineales. Muchos controladores SMPS permiten a los usuarios ajustar externamente el bucle de compensación para obtener una estabilidad y un rendimiento transitorio óptimos.
Las SMPS son sistemas no lineales y variables en el tiempo, debido a las acciones de conmutación. Sin embargo, se pueden modelar con una señal pequeña promediada, un modelo linealizado, que es válido hasta la frecuencia de conmutación de la fuente de alimentación fSW/2. Por lo tanto, se puede aplicar el análisis de estabilidad del bucle de control lineal utilizando diagramas de Nyquist y Bode. Por lo general, el ancho de banda máximo de una SMPS es de aproximadamente 1/10 a ~1/5 de la frecuencia de conmutación fSW. Normalmente, un margen de fase de 45° es aceptable, especialmente para los convertidores reductores buck. Se prefiere un margen de fase de 60°, no solo como valor conservador, sino porque también ayuda a aplanar el gráfico de impedancia de salida del bucle cerrado para un buen diseño de la red de distribución de potencia (PDN). Por lo general, se desea un margen de ganancia de 8 dB a ~10 dB, aunque hay que tener en cuenta que el modelo medio y sus diagramas de Bode solo son válidos hasta fSW/2. Además, para atenuar los ruidos de conmutación en el bucle de compensación de realimentación, se desea una atenuación de ganancia ≥8 dB en fSW/2, como otra directriz de diseño de margen de ganancia o atenuación de ganancia. Para obtener más detalles sobre el modelado de señales pequeñas y el diseño de la compensación de bucles, consulte la nota de aplicación AN149.1 de Analog Devices
Herramientas para generar gráficos de Bode de bucles de alimentación
El análisis de gráficos de Bode es el método estándar y obligatorio para cuantificar la estabilidad de un bucle de alimentación. Existen muchas herramientas de diseño y medición para generar diagramas de Bode.
Herramienta de diseño LTpowerCAD
La herramienta de diseño LTpowerCAD® de ADI (que se puede descargar gratuitamente en analog.com/LTpowerCAD) es una potente herramienta para tareas de diseño y optimización de fuentes de alimentación. Permite a los ingenieros diseñar una SMPS en cinco sencillos pasos,2 incluyendo la búsqueda/selección de componentes, el diseño de la etapa de potencia, la optimización de la eficiencia, el diseño del bucle y la carga transitoria, y la generación de un informe resumido del diseño. Se puede realizar un diseño completo en papel en solo unos minutos. Dentro de LTpowerCAD, se generan diagramas de Bode de bucle en tiempo real con modelos lineales de pequeña señal de los productos de potencia de ADI. El modelo de bucle de cada producto se verificó con la placa de demostración de ADI para garantizar una buena precisión. Los diagramas de Bode en tiempo real y la forma de onda transitoria permiten a los ingenieros diseñar y optimizar rápidamente un bucle de retroalimentación.
La figura 6a muestra la página de inicio de la herramienta LTpowerCAD.
Los usuarios pueden iniciar el diseño de una fuente de alimentación haciendo clic en el icono Supply Design (Diseño de la fuente de alimentación). La figura 6b muestra un ejemplo de los diagramas de Bode de bucle y transitorios de carga de LTpowerCAD utilizando el LTM4638, un regulador reductor µModule® de alta densidad de 20 VIN/15 A. El LTM4638 es un regulador reductor totalmente integrado que incluye un circuito integrado de control, FET, inductor y algunos condensadores de entrada y salida, en un pequeño paquete de 6,25 mm × 6,25 mm × 4 mm. Tiene una opción que permite la compensación del bucle externo para ajustar de forma flexible el bucle a diferentes condiciones de funcionamiento, especialmente con diferentes valores de condensadores de salida. Por lo tanto, el bucle y su rendimiento transitorio siempre se pueden optimizar según sea necesario.
En los gráficos de Bode de LTpowerCAD de la figura 6b, la línea verde vertical indica el ancho de banda de la fuente de alimentación (frecuencia de cruce). El gráfico de fase se traza como fase + 180°, para facilitar la lectura del margen de fase. Esta es también una forma muy utilizada por las herramientas para trazar la fase. La línea roja vertical indica la frecuencia de conmutación de la fuente de alimentación. Dado que los modelos de señales pequeñas promediadas solo son válidos hasta fSW/2, los extraños gráficos de ganancia y fase en zigzag más allá de fSW no tienen ningún significado.
El usuario puede simplemente introducir/cambiar los valores R/C de la red de compensación del bucle, o utilizar las barras deslizantes de valores R/C, y hacer clic en la casilla Freeze Plots (Congelar gráficos) para ajustar y comparar los resultados del gráfico de Bode en tiempo real. Además, el usuario también puede establecer el ancho de banda del bucle deseado (≤1/10 a ~1/5 fSW) y, a continuación, hacer clic en la casilla Use Suggested Compensation (Usar compensación sugerida). La herramienta LTpowerCAD sugerirá automáticamente un conjunto de valores de red de compensación R/C para optimizar el bucle con un ancho de banda rápido y un margen de fase suficiente, independientemente del cambio en COUT en este ejemplo. Esto hace que el diseño de la compensación del bucle sea una acción sencilla, con un solo clic.
Por último, una vez diseñado el suministro en LTpowerCAD con los parámetros óptimos, el diseño se puede exportar a la herramienta de simulación LTspice® para realizar simulaciones dinámicas en el dominio del tiempo.
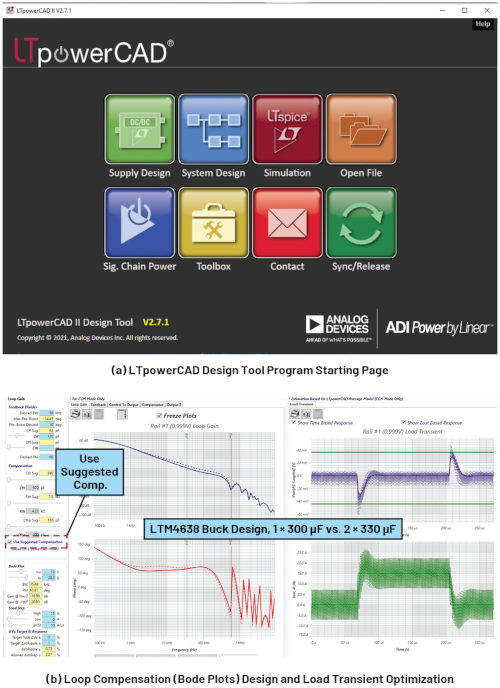
Figura 6. (a) La herramienta de diseño de fuentes LTpowerCAD y (b) su página de diseño de bucles.
Herramienta de simulación de circuitos LTspice
LTspice es una herramienta de simulación de circuitos muy popular de ADI. También se puede descargar de forma gratuita en analog.com/LTspice. LTspice se puede utilizar para la simulación en el dominio del tiempo en estado estacionario y transitorio de un circuito de fuente de alimentación, así como para simular un circuito de CA en el dominio de la frecuencia. Sin embargo, todavía no ofrece una forma rápida y cómoda de simular diagramas de Bode de fuentes de alimentación conmutadas, a menos que se desarrolle un circuito modelo de señal pequeña promedio específico para un circuito de fuente de alimentación conmutada determinado.3,4,5 Un ingeniero puede utilizar la herramienta LTpowerCAD para diseñar una fuente de alimentación que incluya la compensación de bucle y, a continuación, exportar el diseño a LTspice para realizar simulaciones de circuitos más detalladas.
Mediciones de laboratorio de diagramas de Bode
¿Por qué realizar una prueba de laboratorio? Consideración de las variaciones de los parámetros
Debido a la inexactitud y las variaciones de los valores de los componentes externos, los diagramas de Bode de los bucles modelados pueden ser un buen punto de partida, pero pueden no ser muy precisos. Las variaciones más significativas suelen provenir de la red de condensadores de salida. Por ejemplo, la figura 7 muestra que el valor de un condensador cerámico multicapa (MLCC) de alta capacitancia puede variar significativamente con su tensión de polarización de CC o su tensión de ondulación de CA, lo que da lugar a errores en el valor de la capacitancia de entre el 40 % y el 60 %. La variación de la polarización de CC está incorporada en la biblioteca de condensadores de LTpowerCAD, mientras que la variación de la polarización de CA aún no lo está. Otro tipo de condensadores muy utilizados son los condensadores de polímero conductivo. Ofrecen una alta capacitancia, pero también tienen valores de resistencia ESR parásita más altos que los MLCC. Desafortunadamente, el valor ESR típico de la hoja de datos de los condensadores de polímero puede ser inexacto. Peor aún, muchos condensadores de polímero son sensibles a la humedad (MSL3). El valor ESR puede cambiar significativamente con el tiempo si el componente no se almacena en una bolsa hermética y seca.
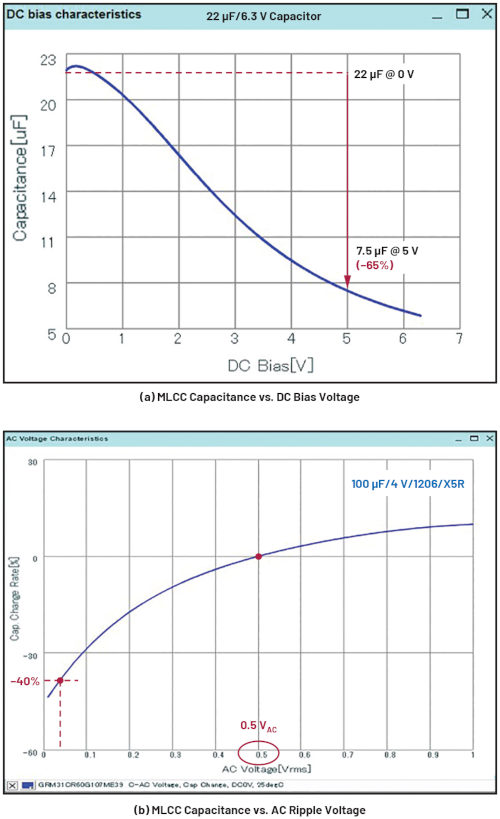
Figura 7. Grandes variaciones del valor MLCC en función de las condiciones de funcionamiento.
¿Por qué realizar una prueba de laboratorio? Consideración de los parásitos de la PCB
A veces, la inductancia o capacitancia parásita de la pista de la PCB también puede causar errores adicionales en los modelos de Bode de bucle. En la figura 8 se muestra un ejemplo de una placa de demostración de un convertidor reductor buck. Una pista de PCB de 3 cm de largo y 10 milésimas de pulgada del pin ITH de compensación puede tener una capacitancia parásita de 10 pF a tierra. Como resultado, provoca una caída notable del margen de fase de ~10°. Del mismo modo, hay que tener en cuenta que la capacitancia parásita del pin de realimentación de alimentación (FB) puede provocar el mismo efecto.
Figura 8. La capacitancia parásita de la pista de PCB del pin ITH de compensación (~10 pF) afecta a los gráficos de fase del bucle.
En conclusión, los gráficos de Bode del bucle modelados no pueden ser muy precisos. Por lo tanto, una prueba de gráficos de Bode en banco es siempre un paso necesario para calificar una fuente de alimentación en la fase de desarrollo.
Medición y consideraciones del gráfico de Bode del bucle
Configuración típica
Un analizador de redes (frecuencia), como el RidleyBox® de Ridley Engineering o el Bode 100 de Omicron Lab, es un equipo comercial típico para medir los gráficos de Bode de la fuente de alimentación. La figura 9 muestra una configuración típica para medir el diagrama de Bode del bucle de un dispositivo de alimentación bajo prueba (DUT). Además de la resistencia de realimentación estándar, se inserta una pequeña resistencia de inyección Ro de 10 Ω a 50 Ω en la ruta de realimentación. El analizador de redes inyecta una pequeña señal de CA de 10 mV a 100 mV a través de Ro para «romper» el bucle. El analizador de redes barre la frecuencia de la señal de CA de baja a alta y, a continuación, mide la señal en los puntos A y B a través de Ro. La función de transferencia de ganancia de bucle T(s) se mide en VA(s)/VB(s) (o ch2/ch1). El analizador de redes calcula la ganancia y la fase de VA(s)/VB(s) en cada punto de frecuencia y, por lo tanto, genera los diagramas de Bode de ganancia y fase.
Consideración de la SNR
Debemos tener en cuenta la relación señal-ruido (SNR) en la medición del bucle en un rango de frecuencias diferente. En particular, un bucle de alimentación suele tener una ganancia muy alta a frecuencias muy bajas, para lograr una alta precisión en la regulación de la salida de CC. A medida que aumenta la frecuencia, la ganancia del bucle disminuye. Dado que la ganancia del bucle se mide como VA(s)/VB(s), la señal VB(s) puede ser muy pequeña a frecuencias muy bajas. Como resultado, el gráfico de ganancia del bucle a frecuencias muy bajas puede ser ruidoso. Por eso, el gráfico de fase medido no suele ser muy suave a bajas frecuencias, mientras que la ganancia sigue siendo alta. Para mejorar la SNR, a veces es útil disponer de una señal de CA de inyección variable en frecuencia. Por ejemplo, la línea verde de la figura 8b muestra una señal CA variable establecida con el analizador de redes. La señal CA es más alta a frecuencias más bajas y disminuye linealmente a medida que aumenta la frecuencia.
Además, para minimizar el ruido de medición, los cables de tierra de la sonda del analizador de redes deben conectarse a una pista de tierra de señal silenciosa cerca del CI controlador de la fuente de alimentación en la PCB.
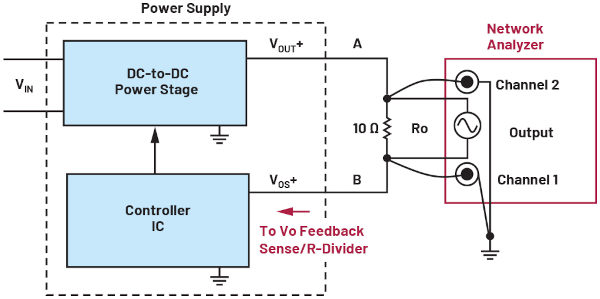
Figura 9. Configuración típica para medir el ancho de banda del bucle de una fuente de alimentación (ganancia del bucle = ch2/ch1).

Figura 10. Configuraciones típicas de medición del diagrama de Bode de una fuente de alimentación DUT: (a) fuente con resistencias de realimentación externas y (b) módulo de potencia con resistencias de realimentación internas.
Medición de un módulo de potencia con resistencias de realimentación integradas
La figura 10 muestra dos opciones de configuración para dos resistencias de realimentación típicas de una fuente de alimentación. La figura 10a es para una fuente de alimentación discreta con el divisor de resistencia de realimentación RT y RB accesibles externamente. Por lo tanto, su configuración de medición de bucle es la misma que la de la figura 9. Sin embargo, muchas fuentes de alimentación integradas, como los módulos de potencia de la serie LTM de ADI, ya tienen una o ambas resistencias de realimentación dentro del módulo moldeado conectadas a VOUT. Por lo tanto, es difícil romper el bucle para insertar la resistencia Ro. En lugar de romper la ruta de detección VO original, se muestra una forma alternativa de medir el bucle en el método de paralelismo de la figura 10b, si el pin de realimentación (FB) sigue siendo accesible. En este caso, un par de resistencias externas de valor mucho menor (1 kΩ) crea el divisor R RT1/RB1 fuera del módulo. En comparación con la figura 10a, las resistencias externas son ahora 1/60 del valor anterior. Debido a la menor resistencia del divisor R paralelo externo, la mayor parte de la corriente de la señal CA fluye a través de esta ruta externa en lugar de la ruta interna. Por lo tanto, la resistencia de inyección Ro se puede insertar en el divisor R externo RT1 y RB1. La figura 11 muestra una comparación de los gráficos de ganancia y fase de Bode de una fuente de alimentación medida con las configuraciones de la figura 10a (método 2) y la figura 10b (método 1). Se superponen dos gráficos de ganancia. El método 1 muestra una ganancia inexacta reducida a frecuencias más bajas. Afortunadamente, esto no es importante, ya que nos interesan principalmente los gráficos de frecuencias más altas, especialmente en torno a la frecuencia del ancho de banda de la fuente de alimentación, donde se miden los márgenes de estabilidad.

Figura 11. Ejemplo de gráficos de Bode con los métodos de medición de la figura 10a y la figura 10b en la misma fuente de alimentación.
Además, si la red de resistencias de realimentación original tiene un condensador de alimentación directa CFF, en el método del divisor R en paralelo, el valor del condensador CFF debe aumentarse proporcionalmente a la relación RT/RT1, para mantener el mismo valor de la constante de tiempo R/C y las frecuencias de polo/cero. La Figura 12 muestra un ejemplo.

Figura 12. Aumento proporcional del valor CFF con un divisor R externo en paralelo.
Conclusión
El criterio de Nyquist y el criterio de estabilidad del bucle de Bode correspondiente son importantes para que un ingeniero comprenda y diseñe una fuente de alimentación rápida y estable. Aunque los gráficos de Bode se utilizan ampliamente para la estabilidad del bucle, a veces se puede utilizar el criterio de Nyquist para explicar gráficos de Bode inusuales. Con conceptos claros de estabilidad del bucle, un ingeniero puede utilizar la herramienta de diseño LTpowerCAD para diseñar y optimizar rápidamente una fuente de alimentación. Además, debido a la variación de los componentes y a los parásitos de la PCB, la medición de Bode en el bucle de laboratorio es un paso necesario para ajustar el bucle. Para obtener un resultado preciso, se deben tener en cuenta consideraciones prácticas sobre la medición y la configuración del bucle.
Referencias
1 Henry J. Zhang. “Application Note 149: Modeling and Loop Compensation Design of Switching Mode Power Supplies.” Linear Technology, January2015.
2 Henry Zhang. “Designing Power Supply Parameters in Five Simple Steps with the LTpowerCAD Design Tool.” Analog Devices, Inc., September2015.
3 Vatché Vorpérian. “Simplified Analysis of PWM Converters Using Model of PWM Switch, Part I: Continuous Conduction Mode.” IEEE Transactions on Aerospace and Electronic Systems, Vol. 26, No. 3, May 1990.
4 Vatché Vorpérian. “Simplified Analysis of PWM Converters Using Model of PWM Switch, Part II: Discontinuous Conduction Mode.” IEEETransactions on Aerospace and Electronic Systems, Vol. 26, No. 3, May 1990.
5 Raymond B. Ridley. “An Accurate and Practical Small-Signal Model for Current- Mode Control.” Ridley Engineering, 1999.
Acerca del autor
Henry Zhang es director de aplicaciones para productos de potencia de Analog Devices. Obtuvo la licenciatura en Ingeniería Eléctrica en la Universidad de Zhejiang (China) en 1994 y el máster y el doctorado en Ingeniería Eléctrica en el Instituto Politécnico de Virginia, en Blacksburg (Virginia), en 1998 y 2001, respectivamente. Trabaja en Linear Technology (ahora parte de ADI) desde 2001. Se le puede contactar en