Introducción
Siempre es importante diseñar una fuente de alimentación estable con una buena respuesta dinámica. Los diagramas de Bode han sido la forma estándar de cuantificar el ancho de banda del bucle y los márgenes de estabilidad de un sistema de retroalimentación, como una fuente de alimentación de bucle cerrado. Sin embargo, en ocasiones, los ingenieros pueden encontrarse con diagramas de Bode inusuales o problemáticos de fuentes de alimentación y pueden no estar seguros de si el bucle tiene márgenes de estabilidad suficientes. En tales situaciones, el criterio y el diagrama de Nyquist proporcionan una forma alternativa de análisis y, en ocasiones, pueden ser más útiles para explicar el concepto y determinar la estabilidad del bucle.
Diagramas de Bode típicos del bucle de una fuente de alimentación y consideraciones de diseño
La figura 1 muestra los diagramas de Bode típicos del bucle de control de un convertidor de potencia conmutado reductor en el dominio de la frecuencia y sus respuestas transitorias de carga en el dominio del tiempo. Se han modelado con la herramienta de diseño LTpowerCAD®. En este ejemplo, las líneas continuas corresponden a un diseño con un ancho de banda de ~32 kHz y un margen de fase de 70°. En general, para un convertidor conmutado buck, un margen de fase superior a 45° suele ser aceptable y uno superior a 60° es suficiente. Sin embargo, se pueden plantear dudas sobre los gráficos de fase de este ejemplo. Alrededor de los 8 kHz, mientras que la ganancia del bucle es muy superior a 0 dB, la fase correspondiente es de unos 38°, lo que está por debajo de 45°. ¿Existe un posible problema de estabilidad al tener un valor de fase bajo mientras que la magnitud de la ganancia sigue siendo alta?
La respuesta es no. Se puede explicar mejor aplicando el concepto del criterio de Nyquist revisado en un estudio anterior.1La figura 2 muestra el gráfico de Nyquist conceptual correspondiente a los gráficos de Bode de línea continua de la figura 1a. Como se muestra, antes de que el gráfico T(jա) cruce la circunferencia unitaria, su ángulo de fase puede ser inferior a 45°, mientras que el gráfico T(jա) está lejos del punto (-1, 0). Por lo tanto, según el criterio de Nyquist, el sistema es realmente muy estable.
De hecho, es posible aumentar la fase del diseño en el rango de frecuencias más bajas por debajo del ancho de banda del bucle, aunque es posible que esto no mejore el rendimiento de la respuesta dinámica del suministro. En este ejemplo, se utiliza una red de compensación simple de tipo 2 con una resistencia RTH en serie con un condensador CTH del circuito amplificador de error de retroalimentación. Podemos aumentar el valor del condensador de compensación CTH de 510 pF a 1500 pF. Los diagramas de Bode correspondientes son los diagramas de líneas punteadas que se muestran en la figura 1a. Cuanto mayor es CTH,más se desplaza el cero de compensación hacia frecuencias más bajas, lo que ayuda a aumentar la fase del rango de frecuencias más bajas por encima de 60°. Sin embargo, esta mejora de la fase no mejora el rendimiento dinámico del suministro. En cambio, como se muestra en la figura 1a, el mayor valorde CTH reduce la amplitud de ganancia de la frecuencia más baja, lo que da como resultado un tiempo de estabilización de VOUT más largo después del transitorio de carga, como se muestra en la forma de onda de línea punteada de la figura 1b. Las amplitudes totales de undershoot y overshoot de VOUT permanecen sin cambios. En conclusión, el diseño original (línea continua en la figura 1) es una mejor opción, a pesar de su menor valor de fase a frecuencias más bajas.

Figura 1. Gráficos de Bode y respuestas transitorias de carga típicas de un convertidor reductor LTC3833 en LTpowerCAD (con diferentes valores del condensador de compensación CTH: línea continua: 510 pF, línea punteada: 1500 pF): (a) gráficos de Bode de ganancia de bucle; (b) respuesta transitoria de carga.

Figura 2. Gráfico conceptual de Nyquist de los gráficos de Bode de línea continua de la figura 1a.

Figura 3. Configuración de prueba de diagramas de Bode del bucle de retroalimentación de una fuente de alimentación estándar.
La figura 3 muestra la configuración de prueba estándar para medir los diagramas de Bode del bucle de retroalimentación de una fuente de alimentación. Se inserta una resistencia de pequeño valor, entre 10 Ω y 50 Ω, en la ruta de retroalimentación de tensión de salida entre VOUT (nodo A) y la entrada Vout_sense del controlador (nodo B), que suele estar encima del divisor de resistencia de retroalimentación interno. El analizador de redes aplica una pequeña señal (normalmente ≤ 50 mV pp) de CA a través de esta resistencia de 10 Ω en un amplio rango de frecuencias. Los diagramas de Bode de la ganancia del bucle se miden detectando y calculando la relación de la señal de CA de VA(s)/VB(s) en un rango de frecuencias mediante el analizador de redes.
A continuación, veamos algunos casos típicos de diagramas de Bode inusuales:
Caso 1: los diagramas de Bode medidos tienen una fase baja o incluso negativa a frecuencias más bajas, mientras que la ganancia del bucle es alta
La figura 4a muestra diagramas de Bode medidos en laboratorio con valores de fase incluso negativos en un rango de frecuencia muy bajo, muy por debajo de la frecuencia del ancho de banda del bucle. Sin embargo, al aumentar la frecuencia, la fase medida aumentó, lo que dio como resultado un margen de fase positivo grande en la frecuencia de cruce fBW. ¿Es estable este sistema?
En primer lugar, observamos que este tipo de diagrama de Bode solo se suele observar en los resultados medidos en laboratorio, mientras que la herramienta de modelo de pequeña señal correspondiente del mismo suministro que utiliza LTpowerCAD no lo muestra. Hay algunas consideraciones prácticas que deben tenerse en cuenta: (1) el resultado de la medición puede ser inexacto a frecuencias más bajas, ya que el diagrama de Bode se mide como VA(s)/VB(s). A frecuencias de conmutación más bajas, la amplitud de la ganancia de bucle es muy alta. Como resultado, para una pequeña señal de incorporada de CA del analizador de redes, la señal VB(s) resultante es muy pequeña. Por ejemplo, la figura 4a muestra que la ganancia de bucle es de aproximadamente 48 dB (~251) a 1 kHz. Si la señal incorporada de CA es de
100 mV, la señal en V(B) se estima en 100 mV/251 = 0,4 mV a 1 kHz. Por lo tanto, es fácil que los ruidos de medición contaminen la señal VB(s), lo que da como resultado un resultado de fase inexacto. (2) A veces, se descubre que la conexión a tierra de la tierra de alimentación del DUT, la tierra de la señal y la conexión a tierra del analizador de redes puede afectar notablemente a los resultados de la medición, especialmente al gráfico de fase a muy baja frecuencia. (3) Puede haber otros detalles de la fuente de alimentación que no se hayan modelado en el modelo simplificado LTpowerCAD. Por ejemplo, el circuito de bucle de bloqueo de fase de sincronización de reloj no suele modelarse debido a su complejidad. (4) Lo más importante es que los diagramas de Bode en el rango de frecuencias muy inferior a la frecuencia de cruce de la fuente de alimentación no determinan la estabilidad de la fuente, incluso si el resultado de la medición es real y preciso. Esto se puede explicar con el gráfico de Nyquist correspondiente que se muestra en la figura 4b: aunque el gráfico T(jա) interseca el eje x (es decir, fase < -180°), no rodea el punto (-1, 0) en el sentido de las agujas del reloj. En realidad, el gráfico T(jա) siempre se mantiene a una buena distancia del punto (-1, 0), por lo que el sistema es muy estable según el criterio de estabilidad de Nyquist. Para respaldar aún más esta afirmación, la figura 5 muestra la forma de onda de la respuesta transitoria de carga en el dominio del tiempo de este convertidor. Demuestra una respuesta transitoria de carga de un sistema muy estable.

Figura 4. Diagramas de Bode medidos del suministro con un extraño diagrama de fase negativa de baja frecuencia y su diagrama conceptual de Nyquist: (a) diagramas de Bode medidos; (b) diagrama conceptual de Nyquist.

Figura 5. Respuesta transitoria de carga medida de la fuente de alimentación de la figura 4a.
Caso 2: El gráfico de ganancia medido cruza los 0 dB varias veces, mientras que la fase es mayor que -180°
La figura 6a muestra otro ejemplo de diagramas de Bode de bucle en los que el diagrama de ganancia cruza el eje de 0 dB tres veces, mientras que el valor de fase sigue siendo muy positivo. ¿Qué puede causar este extraño diagrama de Bode? ¿Es un sistema estable?

Figura 6. Diagramas de Bode con un extraño diagrama de ganancia después de la frecuencia de cruce (generado con la herramienta Simplis) y su correspondiente diagrama de Nyquist que demuestra que se trata de un sistema estable: (a) diagramas de Bode del bucle; (b) diagrama de Nyquist correspondiente.
El gráfico de Bode de la figura 6a suele estar causado por un filtro L/C adicional en el lado de salida de la fuente, después del condensador de salida local de la fuente, como se ilustra en la figura 7. En aplicaciones sensibles al ruido, para atenuar aún más las ondulaciones de conmutación en la tensión de salida, a veces se añade un inductor adicional LS (o perla de ferrita). El inductor LS puede ser un inductor real o la inductancia parásita de los cables de salida o de las trazas largas de la placa de circuito impreso. La resonancia del condensador local, los condensadores remotos CCF y CBF y el inductor de filtro adicional LS crean este gráfico de Bode inusual. Para comprenderlo, la figura 8 muestra el análisis de la impedancia local C/L/C Z1(s) de la fuente de alimentación desde el punto de detección de la salida local VOUT de la fuente de alimentación en este caso. Esta impedancia Z1(s) tiene un valle y un pico resonante en su gráfico de ganancia, lo que da como resultado un valle y un pico en el gráfico de ganancia del bucle.

Figura 7. Fuente de alimentación con filtro L/C de salida adicional.

Figura 8. Análisis de la impedancia Z1(s) del condensador de salida y la red L/C desde el lado de salida local de la fuente.
¿Es estable esta fuente, ya que su gráfico de ganancia de bucle cruza el eje 0 dB varias veces mientras su fase permanece alta? Una vez más, se puede comprobar con el gráfico conceptual de Nyquist correspondiente, como se muestra en la figura 6b. Muestra que el gráfico T(jա) cruza la circunferencia unitaria varias veces, pero no rodea el punto (-1, 0) con una buena distancia. Por lo tanto, según el criterio de Nyquist, se trata de un sistema muy estable. Las simulaciones en el dominio del tiempo del estado estable y del transitorio de carga verifican aún más la estabilidad del sistema, como se muestra en la figura 9.

Figura 9. Gráficos de Bode de bucle y respuesta transitoria de carga de la fuente de alimentación de la figura 6.
Caso 3: Caída rápida de la fase del diagrama de Bode tras el ancho de banda de alimentación
La figura 10 muestra otro diseño de fuente de alimentación con diagramas de Bode inusuales y su correspondiente diagrama de Nyquist. El diagrama de ganancia cruza primero el eje de 0 dB a ~20 kHz con un margen de fase de 45°. Sin embargo, después del ancho de banda de la fuente de alimentación, la ganancia desciende momentáneamente y luego vuelve a acercarse a la línea de 0 dB a más de 40 kHz. Al mismo tiempo, la fase cae bruscamente. Como se muestra en su diagrama de Nyquist conceptual correspondiente, la trayectoria T(jա) pasa por el punto (-1, 0) en su trayectoria y termina con un sistema inestable.

Figura 10. Ejemplo de diagramas de Bode y el diagrama de Nyquist correspondiente (generado con la herramienta Simplis) que muestran un sistema inestable.
La figura 11 muestra la configuración del bucle de retroalimentación del circuito, mientras que los diagramas de Bode de la fuente de alimentación se generan en la figura 10. En este caso, la fuente sigue teniendo una red L/C de filtro posterior adicional. Sin embargo, a diferencia del diagrama del circuito de la figura 7, en la figura 11 el voltaje de salida se detecta desde el lado de la carga remota (VOUTB ), después de la red de filtro posterior.

Figura 11. Fuente de alimentación con filtro posterior y detección remota de VOUT en el nodo VOUTB .
Aquí se utiliza la detección remota VOUT se utiliza aquí para mejorar la precisión de la regulación de CC, ya que compensa la caída de tensión de CC en la ruta de conducción desde la salida A de la fuente de alimentación hasta la carga remota B. Sin embargo, como se muestra en la figura 12, el L/C posterior adicional es un filtro de segundo orden y añade un retraso de fase significativo (hasta 180°) después de la frecuencia de resonancia Lf/C1/C2 en el punto de pico de ganancia del diagrama de Bode.

Figura 12. Análisis de la red L/C de salida con detección VOUT del lado de la carga remota.
La figura 13 muestra la forma de onda de respuesta transitoria de carga en el dominio del tiempo del sistema de la figura 12. La tensión de salida oscila durante los eventos de estado estable y transitorios de carga, lo que demuestra aún más que el sistema es inestable.

Figura 13. Formas de onda de simulación inestables en estado estable y transitorio de la figura 10.
Para estabilizar un sistema de este tipo con un filtro de segunda etapa posterior y una detecciónremota de VOUT, una solución consiste en reducir el ancho de banda de alimentación con un bucle más lento para empujar el pico resonante del filtro posterior muy por debajo de 0 dB. A costa de reducir el ancho de banda del bucle, se compromete el rendimiento de la respuesta transitoria de carga.
Caso 4: Diagramas de Bode de fuentes de alimentación conmutadas con un segundo pico de ganancia en fSW /2
A veces, incluso sin un filtro posterior adicional, una fuente de alimentación conmutada puede mostrar un segundo pico de ganancia a la mitad de su frecuencia de conmutación, que suele ser mucho más alta que la frecuencia del ancho de banda de la fuente de alimentación. En la figura 14 se muestra un ejemplo. A veces, en el caso de una fuente de alimentación con una arquitectura de control de modo de corriente de pico y frecuencia fija, esto puede ser un indicador de que el bucle de retroalimentación de corriente interno es inestable, especialmente si el pico de ganancia del diagrama de Bode aumenta con un ciclo de trabajo PWM del convertidor más grande.

Figura 14. Fuente de alimentación conmutada con un segundo pico de ganancia a la mitad de la frecuencia de conmutación (líneas continuas: ciclo de trabajo = 50 %. Líneas discontinuas: ciclo de trabajo = 40 %).
La figura 15 muestra la forma de onda de conmutación medida de esta fuente de alimentación reductora en modo de corriente pico. La figura 15a muestra la forma de onda de conmutación estable de la corriente del inductor iL y el nodo de conmutación VSW , con un ciclo de trabajo = 41 %. A medida que el ciclo de trabajo aumenta ≥50 %, como se muestra en la figura 15b, la forma de onda de conmutación de la fuente de alimentación comienza a oscilar. La forma de onda VSW muestra pares repetitivos de tiempos de encendido grandes y pequeños. Esto se denomina oscilación subarmónica con un par de pulsos de tiempo de encendido grandes y pequeños, lo que da como resultado un aumento de la ondulación de la corriente del inductor.

Figura 15. Forma de onda de conmutación de un convertidor reductor de corriente pico en diferentes condiciones de ciclo de trabajo: (a) funcionamiento normal (D = 41 %, VIN = 12 V, VOUT = 5 V); (b) bajo oscilación subarmónica (D ≥ 50 %, VIN = 10 V, VOUT = 5 V).
Una forma estándar de solucionar el problema de la oscilación subarmónica es añadir una rampa de compensación de pendiente a la entrada del comparador de corriente del convertidor. La figura 16 muestra que añadir la compensación de pendiente puede eliminar el pico de ganancia en fSW /2. La cantidad de compensación de pendiente óptima depende del ciclo de trabajo. Cuanto mayor sea el ciclo de trabajo, mayor será la compensación de pendiente necesaria. Tenga en cuenta que en la mayoría de los reguladores de modo de corriente pico de ADI, se integra una compensación de pendiente no lineal adaptativa en el controlador IC para garantizar la estabilidad en un amplio rango de ciclo de trabajo, por lo que los usuarios no tienen que preocuparse por el riesgo de oscilaciones subarmónicas.
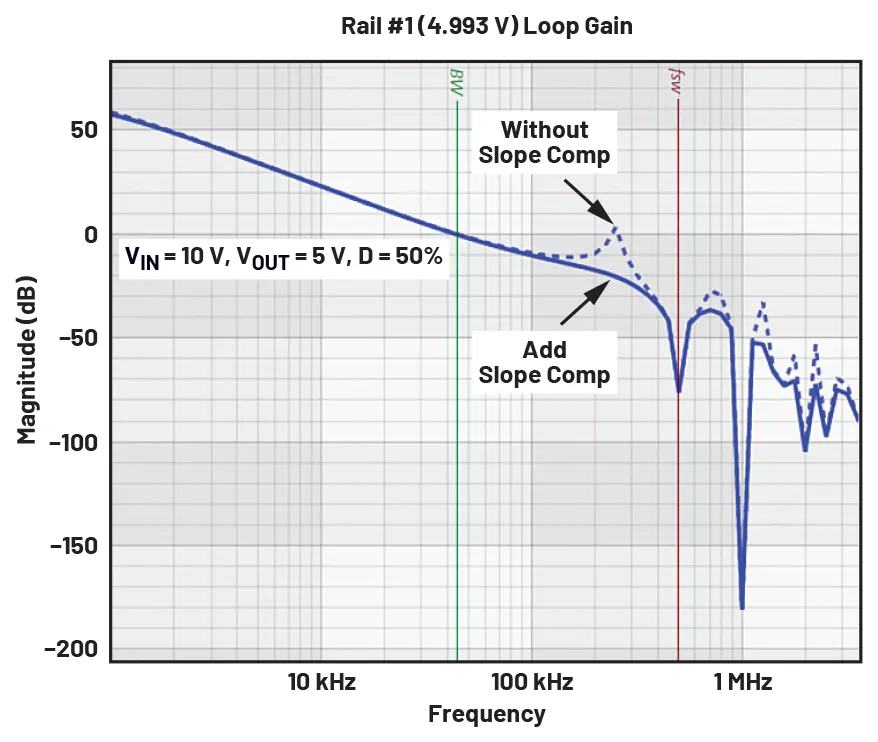
Figura 16. Diagramas de Bode del convertidor de la figura 14 con y sin compensación de pendiente adicional con un ciclo de trabajo del 50 %.
Caso 5: buen margen de fase y margen de ganancia en los diagramas de Bode, pero estabilidad marginal del bucle
Los diagramas de Bode ofrecen una forma cómoda de cuantificar la estabilidad del bucle de un sistema con su margen de fase en su frecuencia de cruce y el margen de ganancia en el punto de fase = -180°. Sin embargo, a veces es necesario revisar los diagramas completos, además de solo dos puntos, para garantizar unos márgenes de estabilidad suficientes.

Figura 17. Gráficos de Bode de una fuente de alimentación con buen margen de fase y margen de ganancia, pero con un gráfico de Nyquist arriesgado.
La figura 17 muestra un par de diagramas de Bode que muestran un buen margen de fase de 93° y un margen de ganancia de 13 dB. Sin embargo, la forma del diagrama de ganancia después de la frecuencia de cruce fBW parece arriesgada. Se mantiene plana en un rango de frecuencias, mientras que el diagrama de fase sigue descendiendo. A partir de su gráfico conceptual de Nyquist, podemos ver que el gráfico T(jա) se acerca peligrosamente al punto (-1, 0) después de que T(jա) cruza el ciclo unitario. Esto indica un riesgo potencial de que T(jա) rodee el punto (-1, 0) con pequeñas variaciones de los parámetros de los componentes. En este caso, el bucle debe rediseñarse para mantener el gráfico T(jա) más alejado del punto (-1, 0) y aumentar los márgenes de estabilidad.
Conclusión
En resumen, el diagrama de Bode de la ganancia del bucle de alimentación es el método estándar y muy eficaz para cuantificar sus márgenes de estabilidad. Sin embargo, en ocasiones, algunos diagramas de Bode inusuales o problemáticos pueden resultar confusos. En este caso, se pueden aplicar el diagrama de Nyquist y el criterio de Nyquist correspondientes para comprender mejor la estabilidad del bucle. Este artículo proporciona algunos ejemplos típicos y consideraciones de diseño de sistemas con diagramas de Bode inusuales.
Referencias
1 Henry Zhang. «Comprender la estabilidad del bucle de la fuente de alimentación y la compensación del bucle - Parte 1: Conceptos básicos y herramientas». Analog Devices, Inc., enero de 2022.
2 Henry Zhang. «Modelado y diseño de compensación de bucle de fuentes de alimentación conmutadas». Nota de aplicación 149, Analog Devices, Inc., enero de 2015.
3 Henry Zhang. «Diseño de los parámetros de la fuente de alimentación en cinco sencillos pasos con la herramienta de diseño LTpowerCAD». Aplicación
158, Analog Devices, Inc., septiembre de 2015.
Autor: Henry J. Zhang, miembro de ADI y director sénior – http://www.analog.com
Acerca del autor
Henry Zhang es miembro técnico y director sénior de aplicaciones en ADI. Obtuvo una licenciatura en Ingeniería Eléctrica por la Universidad de Zhejiang (China) en 1994 y un máster y un doctorado en Ingeniería Eléctrica por el Instituto Politécnico de Virginia, en Blacksburg (Virginia), en 1998 y 2001, respectivamente. Trabaja en Li