Alimentación digital flexible, de fácil utilización y con altas prestaciones

A primera vista, para el experimentado ingeniero en el diseño de fuentes de alimentación, los controladores digitales podrían parecer muy complicados. Después de todo, la conversión conmutada de potencia trata sencillamente acerca de la regulación de una tensión o corriente (o ambas) mediante la generación de una señal de error y aplicando esta señal de error para controlar los tiempos de conexión (on) y desconexión (off) de uno o más interruptores.
Los interruptores básicamente son complementarios o síncronos. ¿Hasta qué punto pueden resultar complicados?
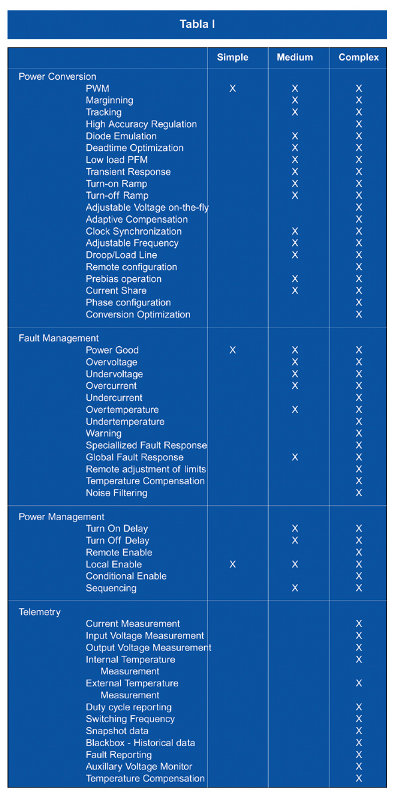
En realidad, los requisitos de la conversión de potencia pueden ser muy sencillos o muy complejos. La Tabla I ofrece las funciones y requisitos que presentan en teoría tres clases de convertidores de potencia: sencillos, medios y complejos. Los controladores más sencillos incorporan pocas funciones más allá de una sencilla regulación, la capacidad de activar y desactivar y posiblemente una indicación de “alimentación correcta”. El controlador resulta algo más complicado cuando la carga es más “sensible”, en cuyo caso requiere más funciones de conversión de potencia, gestión de fallos y cierta gestión de potencia. Finalmente, las aplicaciones complejas necesitan un conjunto completo de conversión de potencia, gestión de potencia, gestión de fallos y telemetría.
En realidad, los requisitos de la conversión de potencia pueden ser muy sencillos o muy complejos. La Tabla I ofrece las funciones y requisitos que presentan en teoría tres clases de convertidores de potencia: sencillos, medios y complejos. Los controladores más sencillos incorporan pocas funciones más allá de una sencilla regulación, la capacidad de activar y desactivar y posiblemente una indicación de “alimentación correcta”. El controlador resulta algo más complicado cuando la carga es más “sensible”, en cuyo caso requiere más funciones de conversión de potencia, gestión de fallos y cierta gestión de potencia. Finalmente, las aplicaciones complejas necesitan un conjunto completo de conversión de potencia, gestión de potencia, gestión de fallos y telemetría.
Flexibilidad
Lo cierto es que para los diseños más sencillos y los requisitos más básicos, un controlador digital probablemente cubre con creces las necesidades. Dado que un controlador digital de potencia es lo suficientemente flexible como para utilizarlo en estas sencillas aplicaciones, probablemente cubre con creces las necesidades. Por otro lado, para diseños más complejos que requieren un conjunto completo de funciones, debería existir una fuerte presión por hallar un controlador analógico que desempeña su función sin añadir circuitería de manera sustancial. En este caso los controladores digitales constituyen una solución obvia y bienvenida.
Los controladores digitales de potencia se pueden adaptar a una amplia variedad de aplicaciones sin circuitería adicional. En este sentido, esta tecnología es mucho más flexible que la antigua tecnología analógica.
Los controladores digitales de potencia presentan generalmente un mayor nivel de integración que los controladores analógicos. Pero la integración no basta para la reutilización y flexibilidad del diseño. Los valores del componente también deben ser flexibles. Imagine los componentes de compensación (resistencias y condensadores) de un compensador analógico común integrados en un controlador. Resistencias y condensadores tienen valore fijos. Por tanto, su integración reduce la flexibilidad del controlador a menos que de algún modo se añada el modo de permitir el ajuste de los calores en función de la aplicación. En un controlador digital, tomando este ejemplo, el compensador se integra en el controlador y los parámetros de compensación residen en los registros digitales en la memoria del controlador. Para cambiar la compensación resulta mucho más sencillo cambiar el valor en el registro.
 Facilidad de utilización
Facilidad de utilización
Los controladores digitales de potencia ofrecen una serie de ventajas en lo relativo a la facilidad de utilización. En primer lugar, con un alto nivel de integración, hay muchos menos componentes que especificar, comprar, seguir, etc. con un controlador digital de potencia. Esto facilita mucho su utilización. En segundo lugar, tal como se ha dicho antes, los valores del componente integrado se definen como valores en registros digitales. Los valores del registro se pueden cambiar fácilmente emparejando la patilla del dispositivo por medio de un interface de comunicación digital y un interface gráfico de usuario. En el último ejemplo, la configuración de un diseño es tan sólo cuestión de apuntar y pulsar. Esto es mucho más sencillo que en el caso analógico que requiere un soldador y un montón de componentecon el riesgo de dejar rastro cada vez que se cambia un componente con las sucesivas iteraciones y optimizaciones del diseño.
Finalmente, los controladores digitales son más fáciles de utilizar porque hay cosas que pueden hacerse con tecnología digital que, sencillamente, son más fáciles de hacer con tecnología digital. Éstos son algunos ejemplos que lo ilustran:
- Los valores analógicos de resistencias y condensadores sólo son positivos. La integración de estas funcio-nes/valores elimina digitalmente esta limitación facilitando el acceso a soluciones difícilmente factibles en el dominio analógico.
- La compensación representa un gran ejemplo en este sentido. La compensación digital ofrece mucho más que la compensación analógica al posibilitar, por ejemplo, el control den modo tensión de circuitos con alta Q con controladores digitales, mientras que es prácticamente imposible con la tecnología analógica.
- Algoritmos de optimización para mejorar las prestaciones. Los diseños analógicos suelen ser soluciones puntuales. Las cargas, fuentes de tensión y condiciones medioambientales raramente son fijas. De ahí el uso de algoritmos de optimización para adaptar las prestaciones bajo estas condiciones cambiantes. Estos algoritmos se implementan fácilmente en controladores digitales con sus microcontroladores embebidos y memoria no volátil.
- Existen algoritmos autoejecutables para controladores digitales que evitan al diseñador el tiempo necesario para la caracterización de un sistema. Por ejemplo, la Autocompensación es una de las funciones que ofrecen este año algunos controladores digitales. En este caso el controlador determina las características de planta y resulta indicado para esa planta en concreto.
- Dado que los valores de los componentes, los estados operativos y las condiciones medioambientales se almacenan en registros digitales, la telemetría está disponible y su uso es sencillo. Las averías se pueden diagnosticar con rapidez y los cambios pueden realizarse para que el sistema se ponga en marcha en un plazo muy breve.
Altas prestaciones
Imagine que utiliza los mismos componentes en la etapa de potencia…los mismos FET, el mismo inductor, los mismos condensadores…y compare las prestaciones del sistema con un controlador analógico y un controlador digital. Al principio es difícil imaginar que pueda haber alguna diferencia dado que las prestaciones se ven determinadas, aparentemente, por los componentes de la etapa de potencia. Pensándolo dos veces, sin embargo, se observa que existen muchos aspectos relativos a las prestaciones que se ven influidos por el controlador. Éstos son algunos ejemplos: - Respuesta a transitorios: Está claro que el método de control influye enormemente sobra la respuesta a transitorios de un sistema. Existen grandes diferencias en la respuesta a transitorios de un controlador con histéresis cuando se compara, por ejemplo, con un control en modo corriente. Cada modo de control presenta ventajas e inconvenientes. Las soluciones digitales ofrecen la capacidad de cambiar totalmente entre modos para proporcionar una respuesta óptima a transitorios. Si bien las soluciones analógicas pueden proporcionar buenas soluciones puntualmente, las soluciones difícilmente son lo suficientemente estáticas como para que una solución puntual sea la solución ideal.
- Respuesta a transitorios: Está claro que el método de control influye enormemente sobra la respuesta a transitorios de un sistema. Existen grandes diferencias en la respuesta a transitorios de un controlador con histéresis cuando se compara, por ejemplo, con un control en modo corriente. Cada modo de control presenta ventajas e inconvenientes. Las soluciones digitales ofrecen la capacidad de cambiar totalmente entre modos para proporcionar una respuesta óptima a transitorios. Si bien las soluciones analógicas pueden proporcionar buenas soluciones puntualmente, las soluciones difícilmente son lo suficientemente estáticas como para que una solución puntual sea la solución ideal.
- Precisión de la regulación: La precisión de la regulación se define generalmente respecto a línea, carga y temperatura. El motivo es que cada una de estas condiciones puede influir sobre la precisión de la regulación. Los controladores digitales pueden monitorizar estas condiciones y adaptar el control para su optimización en todo el abanico de condiciones.
- Estabilidad: El control digital ofrece la mejor compensación (mejor acceso a polos y ceros) que el analógico y por tanto un mayor control respecto a la estabilidad. Además, la compensación puede variar a medida que cambiar las condiciones, permitiendo así una óptima estabilidad para un amplio abanico de condiciones. Los controladores analógicos ofrecen una compensación fija, mientras que el control digital ofrece una compensación ajustable e incluso adaptativa.
- Respuesta a fallos: Los controladores digitales de potencia ofrecen una amplia variedad de opciones de respuesta a fallos. Cada fallo presenta una única característica de respuesta que pueda ajustarse en función de las necesidades del usuario. Los controladores analógicos suelen presentar una respuesta fija frente a fallos (p.ej. corte respecto a picos transitorios respecto a limitación) y son un “tómalo o déjalo” para la selección del usuario. La tecnología digital también puede proporcionar filtros para reducir el potencial para fallos en falso.
- Eficiencia: Existen numerosos efectos de control que influyen sobre la eficiencia, como el tiempo muerto, la frecuencia de conmutación, el nivel de gobierno de puerta, la emulación del diodo y la elevación y reducción de fase, por nombrar tan sólo unos pocos. Los algoritmos de control digital se suministran en los actuales controladores digitales que los optimizan para todas las condiciones operativas. Por tanto, para que un controlador analógico ajuste un controlador analógico para obtener una elevada eficiencia en un único punto operativo, el controlador digital se puede optimizar para todos los puntos operativos.
- Fiabilidad: La reducción del número de componentes y la reducción hacia una menor temperatura operativa (por optimización de eficiencia) son tan sólo dos formas que tiene la tecnología digital de mejorar la fiabilidad de un sistema. Añadiendo a ello la flexibilidad de la respuesta a fallos y la capacidad de detectar cambios sutiles en los parámetros del componente puede obtenerse como resultado unas reducciones notables del tiempo de inactividad.
Conclusión
Para que, a medida que pasan los días, la conversión de potencia se hace más compleja. Las cargas son más sensibles, los costes han de reducirse a medida que aumentan los requisitos, hay menos espacio disponible para conversión de potencia y con el espacio reducido la gestión térmica se hace más difícil. Unido esto al simple hecho de que hay menos ingenieros de diseño especializados en potencia y el resultado es una situación complicada. Por suerte, la alimentación digital representa una solución tecnológica rompedora que aporta un mayor potencial del que pueden proporcionar las soluciones analógicas convencionales.
Flexible, fácil de utilizar y de altas prestaciones, la alimentación digital es una solución ideal para los complicados diseños de fuentes de alimentación del mañana.
Autor: Chris Young, Director Principal, Tecnología de Alimentación Digital, Intersil.
Articulos Electrónica Relacionados
- MOSFET de potencia resistentes... La certificación JANS es la más exigente en cuanto a evaluación y aceptación, por lo que garantiza unos niveles superiores de rendimiento, calidad y fiabilidad ...
- Módulo BLE MBN52832 equipado c... Murata ha anunciado el lanzamiento de su módulo BLE basado en Nordic. El último dispositivo MBN52832 consiste en el CI nRF52832 de Nordic Semicond...
- Fotomicrosensores para montaje... Omron Electronic Components Europe ha ampliado su gama de fotomicrosensores para montaje superficial con una nueva versión de ranura cuya anchura es de 5...
- SoC Renesas DA14592 BLE 5.2 pa... Mouser ya tiene en stock el sistema en chip (SoC, por sus siglas en inglés) DA14592 Bluetooth® Low-Energy (BLE) 5.2 con flash integrado de Renesas Electronics. ...
- Renesas 365 con tecnología de ... Renesas Electronics Corporation y Altium anuncian la presentación de Renesas 365, con tecnología de Altium, una solución industrial pionera en su clase, diseñad...
- Matriz multiespectral de fotod... PIXELTEQ ha lanzado su matriz multiespectral de fotodiodos de 8 bandas PixelSensor™, que incluye ocho fotodiodos selectivos de longitud de onda en un chip cuadr...
- Generador de reloj MEMS multis... Microchip anuncia el generador de reloj MEMS más pequeño del mercado: el DSC613, capaz de sustituir hasta tres cristales y osciladores en una plac...
- Transistores DMOS FET con el p... Toshiba Electronics Europe (TEE) ha puesto en marcha una nueva generación de conjuntos de transistores de alta eficiencia.Las nuevas series TBD62064A y T...
- Servicios seguros de programac... EPS Global, organización mundial en servicios de programación de circuitos integrados y encriptación segura, ha anunciado un servicio de programación segura que...
- Nueva gama de 5 nuevos modelos... ROHM ha desarrollado MOSFET duales que integran dos chips de 100 V en un solo encapsulado, ideales para el accionamiento de motores de ventiladores utilizados e...
- ROHM lanza nuevos modelos SPIC... ROHM ha anunciado el lanzamiento de nuevos modelos SPICE de Nivel 3 (L3) que ofrecen una convergencia significativamente mejorada y un rendimiento de simulación...
- Cinta de uniformidad de 3M que... Al objeto de satisfacer las demandas de flexibilidad de diseños de los fabricantes de pantallas LCD, la división de Sistemas Ópticos de 3M ha desarrollado una s...