Cómo controlar motores CC sin escobillas


Los motores CC sin escobillas se usan con mucha frecuencia en electrodomésticos, equipos industriales y aplicaciones en el sector del automóvil. Son una opción más fiable y con menos requisitos de mantenimiento que los motores con escobillas tradicionales, pero precisan de sistemas electrónicos más complejos para su control. En este artículo, hablaremos de las diferentes técnicas que se usan para controlar un motor CC sin escobillas, los distintos métodos de detección y los algoritmos más empleados.
También veremos algunos de los controladores de motor (en CI) disponibles de los proveedores más importantes, así como recursos adecuados para el desarrollo y los prototipos.
Aplicaciones para motores sin escobillas
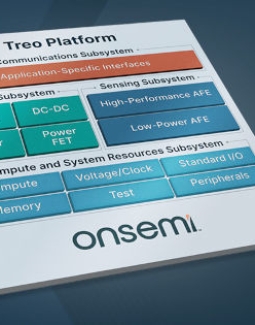
En la última década, los motores CC sin escobillas se han popularizado muchísimo. Se podría decir que su presencia es más frecuente incluso que la del wifi; seguramente, nos sorprendería saber cuántos de estos motores podemos encontrar en nuestra casa, coche u oficina. Según Allied Market Research, el mercado global para los motores CC sin escobillas alcanzará los 72 200 millones de dólares en 2030, un aumento de 33 200 millones con respecto a 2020 (imagen 1). Según su estudio «Brushless DC Motors Market Research, 2030», el TCAC subirá un 10,3 % en todos los motores, y los de 750-3000 W experimentarán una subida especialmente pronunciada.
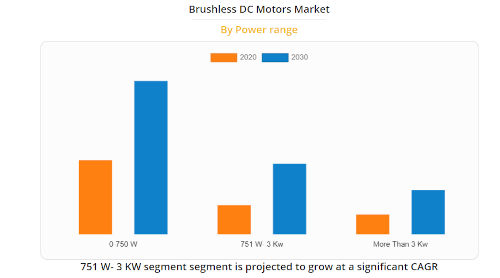
Imagen 1: crecimiento en motores CC sin escobillas 2020-2030 según el informe de Allied Market Research (fuente: AMR - https://www.alliedmarketresearch.com/brushless-dc-motors-market - permission requested)
Los motores CC sin escobillas se pueden emplear en distintas aplicaciones: herramientas con batería, aspiradores domésticos, drones controlados por radio, vehículos eléctricos, etc. En el sector industrial, su uso está ampliamente extendido en entornos como las cintas transportadoras o los robots de producción.
Los motores CC sin escobillas gozan de tanta popularidad porque no necesitan mucho mantenimiento. Tienen un gran nivel de eficiencia energética: normalmente, hasta el 92 %, 10-15 puntos porcentuales superior a un motor con escobillas de tamaño similar. Además, estos motores pueden funcionar a altas velocidades, debido a la carencia de fricción causada por las escobillas. El hecho de que no haya escobillas también permite que sean más pequeños, que hagan menos ruido y que generen menos IEM. Todo esto significa que son el componente ideal para trenes de transmisión en vehículos eléctricos, donde es esencial disponer de grandes niveles de par y velocidad.
La otra cara de la moneda es que estos motores son más caros y requieren un control más complejo, así que habrá que encontrar el equilibrio entre esto y las ventajas de las que hemos hablado. En la imagen 2 hay una comparación entre las configuraciones de motor más comunes, con las ventajas y desventajas. Los motores CC sin escobillas son similares a los motores síncronos de imanes permanentes (MSIP), aunque hay pequeñas diferencias en su funcionamiento y en la construcción interna de los devanados del estátor.
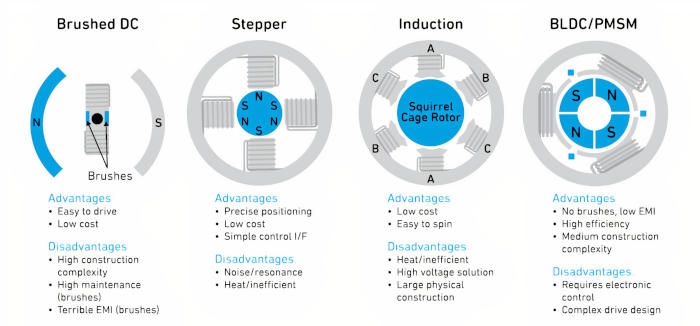
Imagen 2: tipos más frecuentes de motores CC, con sus ventajas e inconvenientes (fuente: Qorvo)
¿Cómo funciona un motor CC sin escobillas?
Antes de meternos en el funcionamiento de un motor CC sin escobillas o un MSIP, recordemos algunos términos básicos relacionados con los motores.
Devanados: son bobinas de cobre colocadas en el rotor o el estátor. Funcionan como electroimanes y generan un campo magnético de acuerdo con el sentido del flujo de la intensidad. Los tres devanados del motor CC sin escobillas de la imagen 2 se pueden colocar en serie para crear un motor de una sola fase o de forma individual, para tener un motor de tres fases.
Rotor: es la parte del motor que gira. En un motor con escobillas, los devanados alrededor del rotor reciben energía a través de estas. En un motor sin escobillas, los devanados se encuentran en el estátor y se colocan imanes permanentes alrededor del rotor. Hay un pequeño espacio de aire (conocido como entrehierro) entre el rotor y el estátor.
Estátor: es la parte que no gira de la estructura del motor. En la imagen 2, se pueden ver los polos magnéticos del estátor en un motor con escobillas; en un modelo sin escobillas, el estátor contiene los devanados no rotatorios.
Conmutación: el método empleado para cambiar el sentido de la corriente en un devanado a fin de lograr el giro.
Fuerza contraelectromotriz: es la energía eléctrica creada en un devanado cuando pasa por un campo magnético. En los motores CC sin escobillas, esta fuerza viene de los imanes permanentes del rotor. La fuerza contraelectromotriz se puede usar para detectar la posición del rotor en relación a los devanados del estátor, a fin de controlar el proceso de conmutación.
La diferencia principal entre un motor CC sin escobillas y un MSIP es la forma de los devanados del estátor y, en consecuencia, las características de la forma de onda de la fuerza contraelectromotriz (imagen 3).
Imagen 3: comparación entre las formas de onda de fuerza contraelectromotriz creadas por un motor CC sin escobillas y un MSIP (fuente: Qorvo)
Sensores y algoritmos para el control de motores
A fin de conseguir la rotación en un motor CC sin escobillas o un MSIP, debemos generar conmutación con señales de control aplicadas en los devanados del estátor. Los controladores de motor con semiconductores (o controladores) crean formas de onda, cuyo número y forma dependerá del tipo de motor y del número de fases. En la imagen 3, se puede apreciar un motor CC sin escobillas controlado con una forma de onda trapezoidal, en contraste con el método sinusoidal con control de campo orientado (FOC) en un MSIP. En un MSIP de tres fases, la conmutación utiliza tres formas de onda sinusoidales con un desfase de 120º entre ellas. Un motor CC sin escobillas también se puede controlar con una onda sinusoidal.
A fin de controlar correctamente el rotor, tanto si usamos un control FOC como uno trapezoidal, debemos conocer con exactitud su posición relativa con respecto a los devanados del estátor. El controlador del motor recibe esta información esencial, lo que le permite controlar la velocidad y el par del motor. Los datos sobre la posición determinan la frecuencia, los periodos, la secuencia y las señales del control.
Hay dos métodos para determinar la posición del rotor: con y sin sensor.
Con sensor: se colocan sensores de efecto Hall junto a cada uno de los devanados del estátor (los recuadros pequeños y azules en la imagen 2) para detectar los cambios en la polaridad (N a S y S a N) del campo magnético durante el giro del rotor. Un motor de tres fases necesita tres sensores.
Sin sensor: en lugar de usar sensores, la posición del rotor se determina mediante la fuerza contraelectromotriz.
Ambos métodos tienen ventajas e inconvenientes. Si usamos sensores de efecto Hall, necesitaremos componentes adicionales (lo que aumentará el coste) y la construcción será más lenta. Sin embargo, los motores con sensor (tanto CC sin escobillas como MSIP) ofrecen excelentes niveles de par y eficiencia, además de gozar de un movimiento rotatorio muy fluido. El controlador de un MSIP suele ser más complejo y, si empleamos el control FOC, necesitamos usar sensores.
El método sin sensores es el más común en motores CC sin escobillas. La ventaja es que el precio es muy atractivo, pero, a fin de determinar la posición del rotor mediante la fuerza contraelectromotriz inducida en los devanados del estátor, necesitamos algoritmos. Uno de los problemas a la hora de usar un método sin sensores en motores CC sin escobillas ocurre en el arranque. Cuando no hay movimiento, no hay fuerza contraelectromotriz, por lo que hay que determinar la posición del rotor de otro modo. Normalmente, se introducen señales de control de alta frecuencia en el devanado de cada fase y un algoritmo calcula la posición correspondiente.
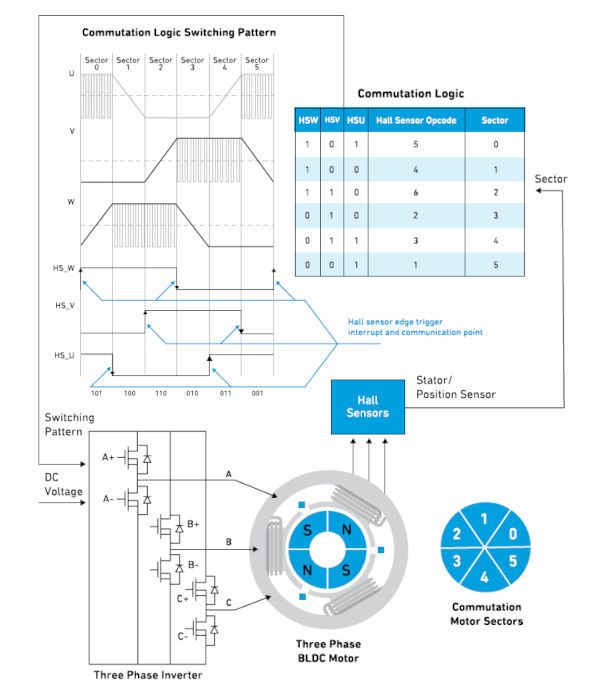
Imagen 4: diagrama simplificado de un motor CC sin escobillas de tres fases con sensores de efecto Hall para la conmutación y para secuenciar el funcionamiento inversor (fuente: Qorvo)
La imagen 4 muestra una configuración simple de un motor CC sin escobillas de tres fases con sensores de efecto Hall (HSW, HSV y HSU). Los sensores son, básicamente, interruptores digitales e indican la polaridad del campo magnético detectado (el norte es el valor 1 y el sur es el valor 0). La salida de los tres sensores se combina para generar un código lógico digital de tres bits que indica la posición y el sentido del rotor durante el giro. Esta información es la base de las señales de control para la etapa inversora del transistor de potencia de tres fases. En aplicaciones con motores CC sin escobillas de poca potencia, la interfaz del sensor, el controlador del motor y los transistores de control suelen estar integrados en un solo CI controlador. Normalmente, los motores de más potencia cogen la salida de la puerta del CI controlador y utilizan MOSFET de potencia con disipador para lograr la intensidad de control deseada.
Para variar la velocidad del motor, la modulación de ancho de pulso (PWM) cambia el ciclo de trabajo: la frecuencia del cambio activado/desactivado. Este método también resulta útil durante el arranque del motor para limitar la intensidad de arranque.
CI controladores de motores CC sin escobillas y recursos de desarrollo
La imagen 5 muestra el diagrama de bloques funcional del controlador para un motor CC sin escobillas de tres fases, sin sensor y de baja potencia, el TI DRV10963. Incluye tres MOSFET de potencia y se puede usar con motores de hasta 5 V/0,5 A para el control de ventiladores de refrigeración en ordenadores portátiles y en procesadores de gran rendimiento. El DRV10963 protege frente a sobrecorriente y cortocircuitos supervisando la intensidad y la tensión de cada MOSFET con un convertidor analógico digital (CAD) multiplexado. Una entrada PWM puede controlar la velocidad del motor para lograr la velocidad deseada. La entrada FR permite cambiar el sentido del motor en el arranque y la salida FG aporta información sobre la velocidad del motor.
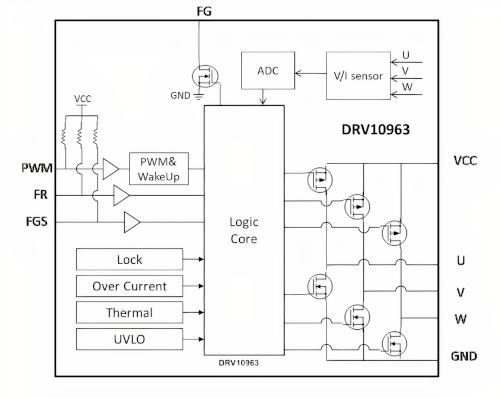
Imagen 5: diagrama de bloques funcional del TI DRV10963 para un controlador de motor CC sin escobillas sin sensor, de tres fases y 5 V (fuente: TI)
Microchip ofrece una gama completa de CI (un solo chip) controladores de puerta y motores CC sin escobillas. Un ejemplo es el MCP8063, un controlador sinusoidal de motor sin escobillas, sin sensores y de tres fases diseñado para ventiladores de refrigeración en automóviles y para bombas.
El controlador de aplicaciones de potencia Qorvo PAC5532 es una excelente opción para una amplia gama de aplicaciones de control de motor de alta velocidad en la automoción, la industria y el sector del consumo, como las herramientas con batería, las bicicletas eléctricas y los vehículos ligeros eléctricos híbridos. El PAC5532 se puede usar con sistemas 48-120 VCC, y contiene un núcleo Arm Cortex-M4F de 32 bits y 150 MHz con gestión de potencia configurable e integral y funciones de control (imagen 6).
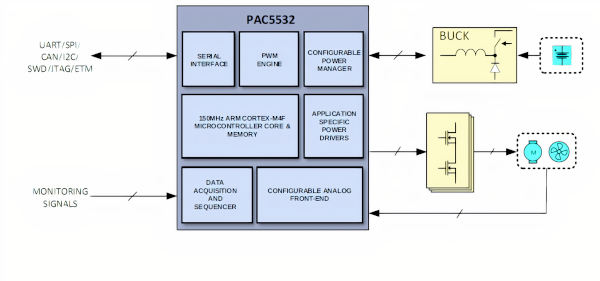
Imagen 6: diagrama de bloques simplificado del Qorvo PAC5532 en aplicaciones de control de motor con batería (fuente: Qorvo)
El PAC5532 se puede complementar con el kit de evaluación Qorvo PAC5532EVK1.
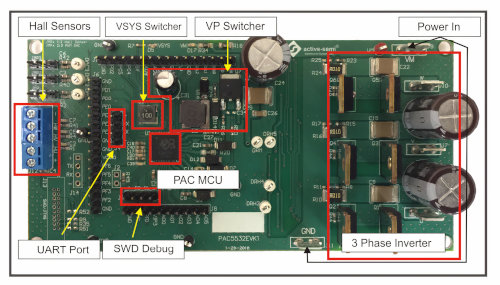
La imagen 7 (fuente: Qorvo) muestra los componentes principales del kit de evaluación, lo que incluye el PAC5532 y los componentes del inversor de medio puente H. Hay un kit de desarrollo de software basado en GUI que se puede descargar en el sitio web de Qorvo.
Otro CI de control de motor es la serie de microcontroladores de gran rendimiento Renesas RA6T2. El CI tiene un núcleo microcontrolador Arm Cortex-M33 de 240 MHz e incluye un acelerador de hardware para acelerar algoritmos de control de motor complejos y ejecutar funciones criptográficas seguras. Hay un completo conjunto de funciones analógicas, como un convertidor de analógico a digital (CAD) de 12 bits, un convertidor de digital a analógico (CDA) de 12 bits, amplificadores de ganancia programable y comparadores de alta velocidad (imagen 8).
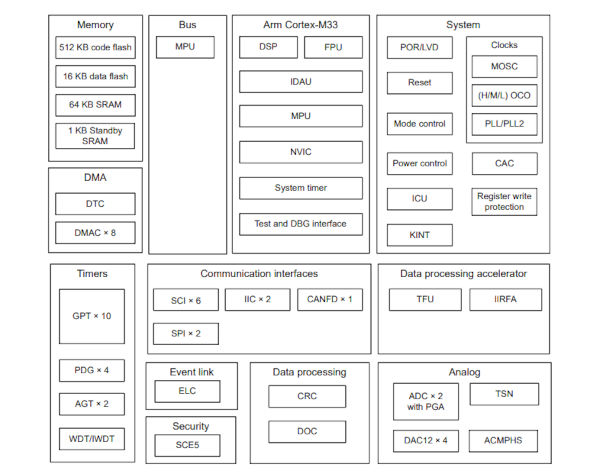
Imagen 8: diagrama de bloques funcional del CI controlador de motores con microcontrolador RA6T2 (fuente: Renesas)
El kit de evaluación Renesas MCK-RA6T2 ofrece un método práctico para crear prototipos de diseños para controladores de motores sin escobillas. Está compuesto por tres placas de conexión (inversor, microcontrolador y comunicaciones), un pequeño motor CC sin escobillas y todos los cables necesarios. La arquitectura funcional del MCK-RA6T2 se muestra en la imagen 9.
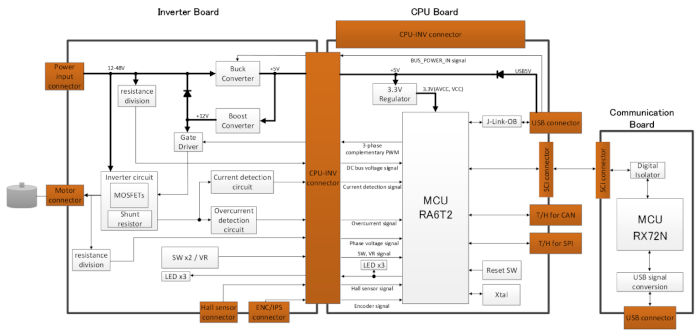
Imagen 9: diagrama de bloques funcional del kit de evaluación para motores sin escobillas Renesas MCK-RA6T2 (fuente: Renesas)
Los primeros pasos en el control de motores CC sin escobillas
En este breve artículo, hemos visto cómo funcionan los motores CC sin escobillas, además de descubrir por qué son tan populares y comentar algunos casos de uso. Las principales soluciones con semiconductores descritas en esta sección son una herramienta práctica, fiable y bien documentada para empezar a hacer diseños con motores CC sin escobillas o MSIP.
Autor: Mark Patrick, Mouser Electronics
Articulos Electrónica Relacionados
- Entorno de desarrollo de Alter... Altera Corporation anuncia un nuevo Entorno de Desarrollo para Control de Motores (Motor Control Development Framework) que proporciona un gran nivel de integra...
- Relé MOSFET de 2,9 mm2 que con... Omron Electronic Components Europe ha lanzado lo que según la propia compañía es el relé MOSFET más pequeño del mundo ...
- Borna de doble piso para conec... Las nuevas bornas para placa de circuito impreso de la serie SPTD 1,5 de Phoenix Contact permiten a los usuarios conectar cables con puntera de hasta 1,5 mm2, e...
- Interfaces a Relé con alimenta... La firma de módulos electrónicos Cebek amplía su catálogo de circuitos optoacoplados con aislamiento entrada - salida con tres nuevos modelos que incorporan rel...
- Arrancadores suaves de 2 y 3 f... La creciente demanda en el mercado de las bombas de calor y la tendencia general por reducir las emisiones de CO2 contribuyen al aumento de sistemas de climatiz...
- Relé industrial Omron G2RV-ST ... OMRON ha anunciado el lanzamiento de su último relé electromecánico industrial de 6 mm G2RV-ST para fabricantes de máquinas y cuadros eléctricos en aplicaciones...
- Conectores de alta potencia FO... Mouser Electronics, Inc. dispone de conectores de alimentación modulares Forge de TE Connectivity (TE). Esta nueva plataforma de herramientas proporciona...
- Conectores de pin y orificio P... TE Conectivity (TE) ha lanzado una serie de conectores de pin y orificio Poke-In Slim Wire que permiten hacer conexiones de cable a placa y de placa a placa de ...
- Relé Omron G5PZ-X Omron Electronic Components Europe ha anunciado un relé de potencia para corriente continua de pequeño tamaño que libera espacio en la placa de circuito impreso...
- Interruptor de encendido con e... Alps Electric Europe GmbH presenta la serie SDDE de interruptores de potencia con codificador integrado para un cómodo control de un programa de cambio de lavad...
- Arrancador de motor híbrido Co... Con Contactron pro, Phoenix Contact ofrece una nueva variante del arrancador de motor híbrido Contactron. Los nuevos equipos disponen de una integraci&oa...
- Sensor magnetoresistivo para c... Mouser Electronics presenta el sensor magnetoresistivo para control de motor de corriente continuad de Analog Devices, ADA4571 compuesto por un sensor magnetore...