Conectividad y comunicaciones entre vehículos eléctricos (BEVs) y redes eléctricas inteligentes (Smart Grids)


![]() Desde que se anunciaron por las diferentes casas de automoción la salida al mercado de nuevos vehículos eléctricos puros (BEVs) e híbridos enchufables (PHEVs) se ha empezado a establecer en el mercado las distintas necesidades futuras de comunicaciones entre el vehículo y la red eléctrica. En este artículo se comentan las disposiciones recogidas en documentos de trabajo y normativas que los distintos grupos de trabajo de SAE, ISO/IEC y otros preparan para establecer los requerimientos de las comunicaciones entre vehículo y red y los tipos de casos que nos podemos encontrar en un futuro muy próximo.
Desde que se anunciaron por las diferentes casas de automoción la salida al mercado de nuevos vehículos eléctricos puros (BEVs) e híbridos enchufables (PHEVs) se ha empezado a establecer en el mercado las distintas necesidades futuras de comunicaciones entre el vehículo y la red eléctrica. En este artículo se comentan las disposiciones recogidas en documentos de trabajo y normativas que los distintos grupos de trabajo de SAE, ISO/IEC y otros preparan para establecer los requerimientos de las comunicaciones entre vehículo y red y los tipos de casos que nos podemos encontrar en un futuro muy próximo.
Documentos de referencia, marco normativo
Uno de los principales problemas al que se puede enfrentar un mercado nuevo como es el del vehículo enchufable PEV es el de la falta de definición de un marco regulatorio que permita la expansión de redes y vehículos sobre componentes y sistemas normalizados, la estandarización del mercado es clave para el éxito de esta nueva oportunidad para la industria del automóvil y de las empresas eléctricas.
Revisando lo que encontramos en mercados tan importantes como el americano, europeo y japonés vemos que se están cerrando la mayoría de disposiciones y estándares en estos momentos, revisaremos las disposiciones SAE, UL, IEC e ISO
 Documentos de referencia del SAE
Documentos de referencia del SAE
La Sociedad de Ingenieros de Automoción (SAE) señala una serie de documentos de trabajo que hacen mención a diferentes aspectos a tener en cuenta en la comunicación entre el vehículo y la red inteligente (smart Grid), además del J1772 que establece las consideraciones para el conector tipo encontramos las denominadas J2836 y J2847 . Cada uno de estos documentos se separan en cincos apartados enfocados a las siguientes líneas:
/1.- Niveles de incentivos recogidos como recomendación.
/2.-Detalles de requerimientos de los equipos para cargadores DC offboard denominados EVSE, Electric Vehicle Supply Equipments.
/3.-Establece los indicativos para establecer el futuro tránsito de la energía desde el vehículo a la red.
/4.- Establece los sistemas de diagnósticos del sistema de carga.
/5.- Contendrá las opciones específicas de los diferentes fabricantes de vehículos.
Además encontramos las siguientes regulaciones:
- SAE J2894 (Charger Power Quality Requirements) que establece una serie de estándar para cargadores embarcados.
- SAE J2293 (Energy Transfer System for Electric Vehicles) – define regulaciones para equipos de apoyo
- SAE J2464 (Electric and Hybrid Electric Vehicle Rechargeable Energy Storage System (RESS) Safety and Abuse Testing), registra una serie de recomendaciones de test , procedimientos y análisis de datos en sistemas de almacenamiento.
Por último podemos encontrar en el documento J2931 diferentes requerimientos para el uso de PLC (Power Line Carrier Communication) como elemento de comunicación entre el vehículo y el EVSE.
 UL
UL
Establece una serie de normas de referencia como son:
Electric Vehicle (EV) Charging System Equipment – UL 2202 que establece una serie de premisas para la seguridad de la estación de carga y una serie de harmonizaciones con regulaciones SAE, otras normas de referencia son:
- UL 1998, Software en componentes programables.
- UL 2231, Sistemas de Protección Personal para circuitos de alimentación de vehículos eléctricos (EV).
- UL 2251, Son una serie de actualizaciones sobre conexiones (Plugs, Receptacles, and Couplers for Electric Vehicles).
- UL 2594, Nuevo estándar del conector.
- UL 1741, sobre equipamiento en general (Inverters, converters, controllers and interconnection System Equipment for use with Distributed Energy Resources).
IEC
- IEC 61851 (IEC TC69/WG4), sistemas de carga para vehículos eléctricos, carga conductiva (Electric vehicle conductive charging system, Part 1, 21,22, 23).
- IEC 61851-24 (IEC TC69/WG4), sistemas de carga para vehículos eléctricos, carga conductiva, comunicaciones entre vehículos y red (Electric vehicle conductive charging system-Part 4: Communication between vehicle and charging station)
- IEC 62196 (IEC TC23/SC23H) – Acoplamientos y conectores (Part 1: Plugs, socket-outlets and vehicle couplers - Conductive charging of electricity vehicles)
- IEC 62196 (IEC TC23/SC23H) - Acoplamientos y conectores (Part 2: Dimensional interchangeability requirements for pin and contact-tube vehicle couplers)
 ISO
ISO
ISO 12405-1 (ISO/TC22/SC21) especificación de test para baterías de Ión –Litio en aplicaciones de potencia.
Joint ISO/TC 22/SC 23 - IEC TC69: interfaces de comunicación vehículo-red.
ISO TC22, que refundirá los trabajos de IEC TC69 con otros grupos de trabajo (SC3/WG1, SC21).
Punto de partida, arquitecturas futuras de carga
Para establecer las arquitecturas futuras es necesario entender las necesidades de carga y de comunicación que irá evolucionando en paralelo a la aparición de nuevos vehículos y tecnologías. Un punto de partida para estimar la necesidad de carga de baterías la podemos encontrar en el vehículo híbrido (entendamos full hybrid, HEV) de nuestros días (Toyota Prius, Honda Insight, Lexus...), en este podemos estimar en 1,5 kWh la necesidades de carga para la batería, en este caso obviamente no existe una necesidad de energía exterior siendo el propio vehículo el que realiza la misma. La evolución del mismo podemos encontrarla en los denominados híbridos enchufables (PHEV, Plug-in hybrid EV), en este caso la necesidad de carga de la batería nos lleva a 8 kWh. Por último el vehículo eléctrico puro (BEV) de próxima entrada en nuestros mercados elevará hasta los 25 kWh la necesidad de potencia para la carga de la batería (figura 1).
Entendiendo que parte de un modelo que comprende acciones en USA, Europa y zona APAC el documento inicial J1772 establece los fundamentos del interface entre el vehículo y el sistema EVSE incluyendo el conector, este sistema de carga offboard se puede dividir en tres arquitecturas que incluyen:
- Nivel 1, entendemos que es el nivel básico desarrollado para ser soportado por una carga de baterías doméstica en zonas USA/Japón, los requerimientos de potencia oscilan entre los 1,5-2 kWh (sobre unos 120 V, 15-20 A), los tiempos de cargan pueden oscilar pero establecemos que entre 6 y 8 horas se puede llegar a la carga de la batería.
- Nivel 2, sobre los 240 V, monofásico, para alcanzar los 19,2 kWh (80 A), y
- Nivel 3, Carga en DC, ultrarrápida, pensada para atacar directamente a la batería y reducir al máximo el tiempo de carga, Es en este tipo de carga cuando se necesita especialmente una comunicación entre el vehículo y el sistema EVSE (cargador exterior), los requerimientos recogidos en el documento de trabajo J2293
- Las aportaciones recogidas en las indicaciones SAE se refunden en el sistema ISO/IEC, encontramos los modos 1, 2, 3 y 4, este último establece además diversos casos que pueden variar dependiendo del país.
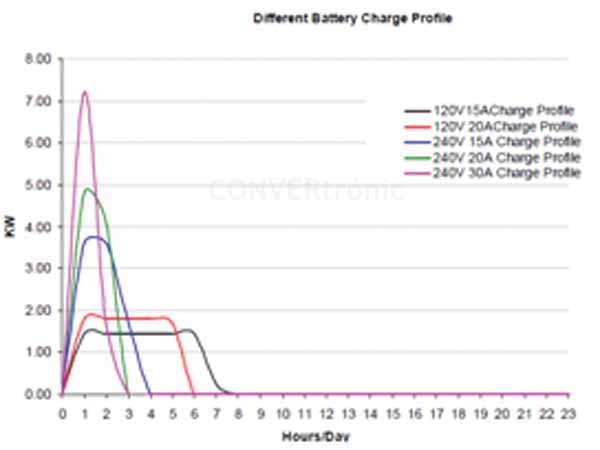
 Si recogemos en una gráfica los tiempos de carga y la potencia transferida (figura 2) podemos encontrar que podemos alcanzar picos de 7 kW en una carga de 3 horas (240 V, 30 A).
Si recogemos en una gráfica los tiempos de carga y la potencia transferida (figura 2) podemos encontrar que podemos alcanzar picos de 7 kW en una carga de 3 horas (240 V, 30 A).
Carga de baterías Vs Tiempo de carga
Llegados a este punto es interesante analizar cómo la batería es capaz de cargarse manteniendo un estado de salud (SOH, State of Health) que permita maximizar su vida, esto es especialmente importante en el ámbito del vehículo eléctrico donde el coste de estas baterías (normalmente de polímero de Ion Litio) es más que destacado (dependiendo de la tecnología de fabricación podemos establecer en unos 400-700 USD por kW de media), cada carga rápida limita este valor de SOH pudiendo recortar el tiempo de vida si se abusa de este medio. El concepto SOH resulta cuanto menos difícil ya que debe ser capaz de parametrizar el comportamiento de las cargas y descargas de la batería para pronosticar (cabe preguntarse si garantizar) una vida futura de la misma.
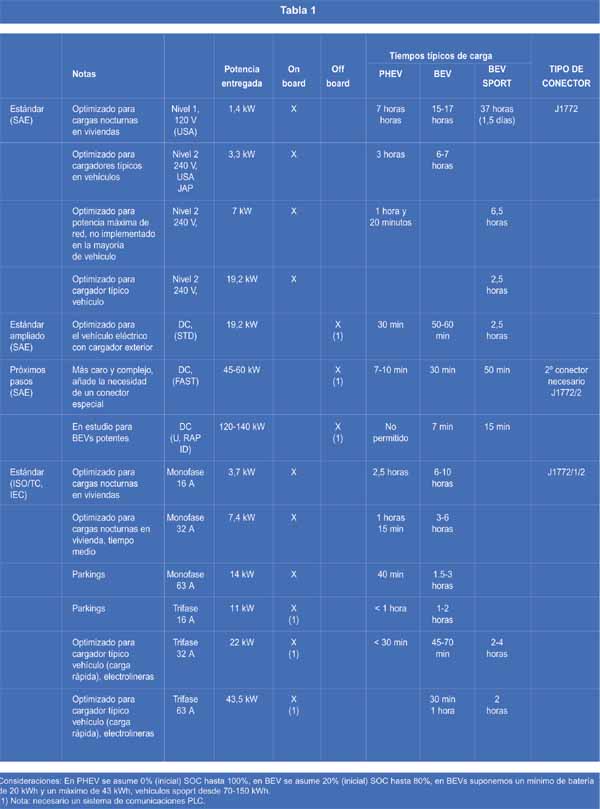
La medida del estado de carga (SOC, State of Charge), parámetro mucho mas intuitivo que el comentado SOH, refleja el estado de carga de la batería, hemos comentado que especialmente en aquellos niveles de carga que usen carga trifásica o DC para acortar los tiempos de carga la medida de este parámetro y su conocimiento por un sistema supervisor pueden ser claves para asegurar que no afectamos (al menos no en una proporción alta) a la vida futura de la batería. Para establecer unos tiempos tipo de carga de tenemos que analizar la potencia a trasladar y también la situación del cargador (fuera o dentro del vehículo, off-board u onboard). En la Tabla I podemos encontrar tiempos típicos dependiendo de la potencia de partida y el tipo de vehículo.
Es interesante también apreciar como varían los tiempos de carga frente a la potencia de partida.
En la misma tabla podemos apreciar que la conectividad PLC desde el vehículo al elemento supervisor del EVSE es necesaria para garantizar una comunicación entre el vehículo y el punto de carga, en el caso de situarse el cargador fuera del vehículo es totalmente mandatario.
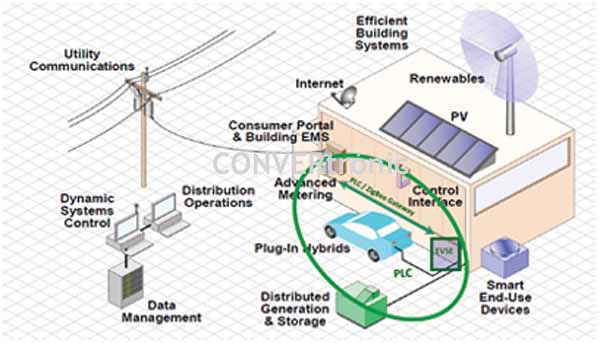
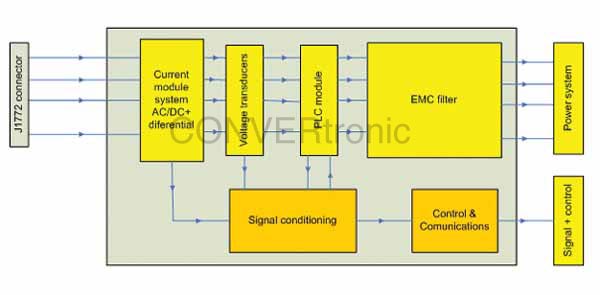
Para sistemas de carga más lenta puede dotar también se entiende necesario ya que dotará al sistema de al sistema de una potente herramienta que podría garantizar una carga efectiva y rápida además de dotar de inteligencia en cuanto a medida de energía y comunicaciones al vehículo. Un sistema típico que englobaría al vehículo dentro de un sistema completo de Smart Grid podría ser el que muestra en la Figura 3. Para asegurar esta comunicación además de realizar una supervisión de los parámetros de carga (corriente, tensión) la empresa PREMO junto a Nagares se encuentran desarrollando tecnología para los denominados módulos de filtrado y supervisión de BEVs y PHEVs, básicamente son sistemas que aportan al vehículo un conocimiento sobre el tipo de carga que están recibiendo además de realizar un filtrado de la corriente que usa el vehículo para la carga de baterías, la información de tensión-corriente la proporcionan un conjunto de sensores que incluyen medida de tensión, corriente AC y DC por línea además de una medida de alta precisión de la corriente en modo diferencial que permite establecer un nivel de seguridad para prevenir deficiencias o faltas de aislamiento durante las operaciones de carga (figura 4).
Conclusiones
Hemos comentado diferentes puntos como los niveles de carga establecidos y cómo podemos afectar a la carga realizando un control de la misma tanto desde el vehículo en los denominados niveles 1 y 2 como remotamente desde un cargador DC dotado de comunicaciones con el vehículo.
Si analizamos la tendencia y los objetivos trazados por diferentes compañías y organizaciones podemos entender que la carga de BEVs y PHEVs realizada sobre redes inteligentes permitirá los siguientes cuatro puntos básicos:
1. Establecimiento del tiempo de uso (TOU, Time of Use), establecimiento de sistemas de gestión de uso de red.
2. Abrirá un abanico de posibilidades en lo que se denomina DLC ( Direct Load Control) que permitirá el análisis de la red de vehículos conectados a red.
3. Programas P/HP (Periodic/Hourly Pricing) programas de precio adaptados a usuarios.
4. Capacidad de manejar la carga de baterías como cargas activas.
El documento de prácticas recomendadas J2836 establece además protocolos de referencia para la estructura de mensajes entre el vehículo y la red (Smart Energy Profile 2.0 Message structures), como referencia en desarrollo de casos de uso también podemos estudiar el documento de referencia J2847.
El grupo PREMO junto a los distintos socios en proyectos nacionales e internacionales trabaja en desarrollo de tecnologías destinadas a vehículos eléctricos e híbridos, especialmente en componentes inductivos para convertidores de alta eficiencia, sistemas de monitorización de corriente de carga de baterías y módulo de filtrado y comunicaciones.
PREMO desarrolla tecnología para sistemas de filtrado, comunicaciones y medida de energía conjuntamente con la empresa NAGARES, ambas empresas han sido reconocidas como compañías innovadoras en el congreso SAE 2010
en Detroit.
Autor: Felipe Jerez, CTO Grupo PREMO
Articulos Electrónica Relacionados
- Sistemas eléctricos centrales ... ERNI Electronics ha desarrollado, sobre la base de su especialización en la tecnología de ajuste por presión, los sistemas eléctricos centrales de la línea BLUE...
- Moto didáctica con célula de c... Cebekit presenta el C-7107, un nuevo kit de desarrollo tecnológico basado en la experimentación y el juego como método de aprendizaje.En to...
- Actualización del software de ... PC by Schneider Electric actualizará el software de gestión InfraStruxure 6.2, que incluye novedades en el sistema de supervisión InfraStruxure Central e InfraS...
- OCÉ ARIZONA imprime interrupto... Océ anuncia que gracias a la gama Océ Arizona, ha entrado en el mercado de la impresión de interruptores de membrana industriales Membrane Switch Overlay (MSO)....
- Ordenadores de placa Intel Com... RS Components (RS), marca comercial de Electrocomponents plc presenta el nuevo Compute Stick de Intel que ofrece la versatilidad de poder llevar la inform&aacut...
- RS Components dispone en stock... RS Components (RS), el mayor distribuidor de productos y servicios de electrónica y mantenimiento a nivel mundial y la marca comercial de Electrocomponents plc,...
- Circuito de carreras que funci... Cebekit dispone en su catálogo de herramientas didácticas que permiten que los más jóvenes conozcan las diferentes energías alternativas. Una de estas herramien...
- Reguladores de tiras LED Cebek presenta varios tipos de reguladores para tiras de led de 12 Vcc, reguladas por potenciómetro incluido en el circuito.Entre ellos están los ...
- Tablet PC de 7 "Multi-Touch ru... AAEON, distribuido por Tempel, anuncia el RTC-700A, un tablet rugerizado de 7” que añade a su familia de dispositivos móviles rugerizados. El RTC-700A pesa sólo...
- Cajas de acero inoxidable con ... Powell Electronics tiene ahora en stock la nueva gama HYPB de cajas de acero inoxidable IP69/IP69K con cierre a botón para aplicaciones de higiene de Hammond Ma...
- Sistema RADOX® MCS1500 para ca... HUBER+SUHNER ha calificado con éxito su sistema RADOX MCS1500 en múltiples pruebas de campo. El RADOX MCS1500 está diseñado para proporcionar una carga continua...
- Unidades SSD de consumo Kioxia... KIOXIA Europe ha anunciado hoy el lanzamiento de nuevas unidades SSD de consumo programado para el tercer trimestre de 2023. La serie EXCERIA PLUS G3 aprovechar...