Ingenieros del MIT diseñan "esqueletos" blandos y flexibles para robots musculares

Nuestros músculos son los actuadores perfectos de la naturaleza: dispositivos que transforman la energía en movimiento. Por su tamaño, las fibras musculares son más potentes y precisas que la mayoría de los actuadores sintéticos. Incluso pueden curarse de los daños y fortalecerse con el ejercicio.
Por estas razones, los ingenieros están estudiando formas de alimentar robots con músculos naturales. Han demostrado un puñado de robots "biohíbridos" que utilizan actuadores musculares para impulsar esqueletos artificiales que caminan, nadan, bombean y agarran. Pero cada robot tiene una estructura muy diferente y no existe un plan general para sacar el máximo partido de los músculos.
Ahora, los ingenieros del MIT han desarrollado un dispositivo similar a un muelle que podría utilizarse como módulo esquelético básico para casi cualquier robot con músculos. El nuevo muelle, o "flexor", está diseñado para sacar el máximo partido de cualquier tejido muscular acoplado. Al igual que una prensa de piernas con el peso justo, el dispositivo maximiza la cantidad de movimiento que un músculo puede producir de forma natural.
Los investigadores descubrieron que cuando ajustaban un anillo de tejido muscular al dispositivo, de forma parecida a una goma elástica estirada alrededor de dos postes, el músculo tiraba del muelle, de forma fiable y repetida, y lo estiraba cinco veces más, en comparación con otros diseños de dispositivos anteriores.
El equipo considera el diseño de la flexión un nuevo bloque de construcción que puede combinarse con otras flexiones para construir cualquier configuración de esqueletos artificiales. A continuación, los ingenieros pueden dotar a los esqueletos de tejidos musculares para impulsar sus movimientos.
"Estas flexiones son como un esqueleto que ahora se puede utilizar para convertir el accionamiento muscular en múltiples grados de libertad de movimiento de forma muy predecible", afirma Ritu Raman, Catedrática de Desarrollo Profesional en Diseño de Ingeniería Brit y Alex d'Arbeloff del MIT. "Estamos dando a los roboticistas un nuevo conjunto de reglas para fabricar robots potentes y precisos impulsados por músculos que hagan cosas interesantes".
Raman y sus colegas informan de los detalles del nuevo diseño de la flexión en un artículo que aparece en la revista Advanced Intelligent Systems. Entre los coautores del estudio en el MIT se encuentran Naomi Lynch (12), SM (23), la estudiante Tara Sheehan, los estudiantes de posgrado Nicolas Castro, Laura Rosado y Brandon Rios, y el profesor de ingeniería mecánica Martin Culpepper.
Tirón muscular
Cuando se deja solo en una placa de Petri en condiciones favorables, el tejido muscular se contrae por sí solo, pero en direcciones que no son del todo predecibles ni de mucha utilidad.
"Si el músculo no está sujeto a nada, se moverá mucho, pero con una enorme variabilidad, de modo que sólo se agitará en el líquido", explica Raman.
Para conseguir que un músculo funcione como un actuador mecánico, los ingenieros suelen fijar una banda de tejido muscular entre dos pequeños postes flexibles. Cuando la banda muscular se contrae de forma natural, puede doblar los postes y juntarlos, produciendo un movimiento que, idealmente, impulsaría parte de un esqueleto robótico. Pero en estos diseños, los músculos han producido un movimiento limitado, sobre todo porque los tejidos varían mucho en su contacto con los postes. Dependiendo de dónde se coloquen los músculos en los postes y de qué parte de la superficie muscular toque el poste, los músculos pueden conseguir unir los postes, pero otras veces pueden tambalearse de forma incontrolable.
El grupo de Raman trató de diseñar un esqueleto que concentrara y maximizara las contracciones de un músculo independientemente de dónde y cómo se colocara exactamente en el esqueleto, para generar el máximo movimiento de forma predecible y fiable.
"La pregunta es: ¿cómo diseñamos un esqueleto que utilice de la forma más eficiente la fuerza que genera el músculo?". afirma Raman.
Los investigadores consideraron primero las múltiples direcciones en las que un músculo puede moverse de forma natural. Pensaron que si un músculo tiene que tirar de dos postes en una dirección determinada, los postes deben estar conectados a un muelle que sólo les permita moverse en esa dirección al tirar de ellos.
"Necesitamos un dispositivo que sea muy blando y flexible en una dirección y muy rígido en todas las demás, de modo que cuando un músculo se contraiga, toda esa fuerza se convierta eficazmente en movimiento en una dirección", explica Raman.
Flexión suave
Raman encontró muchos de estos dispositivos en el laboratorio del profesor Martin Culpepper. El grupo de Culpepper en el MIT se especializa en el diseño y fabricación de elementos de maquinaria, como actuadores en miniatura, cojinetes y otros mecanismos, que pueden incorporarse a máquinas y sistemas para permitir movimientos, mediciones y controles ultraprecisos en una amplia variedad de aplicaciones. Entre los elementos mecanizados de precisión del grupo se encuentran las flexiones, dispositivos similares a muelles, a menudo fabricados a partir de vigas paralelas, que pueden flexionarse y estirarse con precisión nanométrica.
"Dependiendo de lo finas y separadas que estén las vigas, se puede cambiar la rigidez del muelle", explica Raman.
Ella y Culpepper se asociaron para diseñar una flexión específicamente adaptada con una configuración y rigidez que permitieran al tejido muscular contraerse de forma natural y estirar al máximo el muelle. El equipo diseñó la configuración y las dimensiones del dispositivo basándose en numerosos cálculos que realizaron para relacionar las fuerzas naturales de un músculo con la rigidez y el grado de movimiento de una flexión.
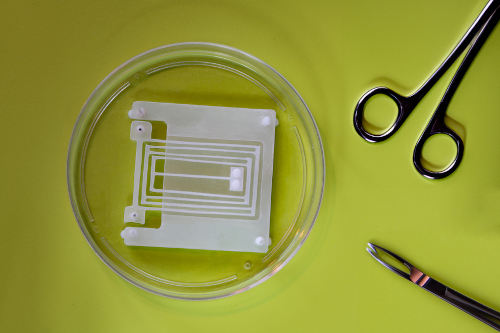
La flexión que finalmente diseñaron es 1/100 la rigidez del propio tejido muscular. El dispositivo se asemeja a una estructura en miniatura en forma de acordeón, cuyas esquinas están sujetas a una base subyacente por un pequeño poste, que se asienta cerca de un poste vecino que se ajusta directamente a la base. A continuación, Raman enrolló una banda de músculo alrededor de los dos postes de las esquinas (el equipo moldeó las bandas a partir de fibras musculares vivas que cultivaron a partir de células de ratón) y midió lo cerca que se acercaban los postes al contraerse la banda muscular.
El equipo descubrió que la configuración de la flexión permitía a la banda muscular contraerse principalmente en la dirección entre los dos postes. Esta contracción concentrada permitía al músculo acercar mucho más los postes -cinco veces más- que los anteriores diseños de actuadores musculares.
"La flexión es un esqueleto que diseñamos para que fuera muy blando y flexible en una dirección y muy rígido en las demás", explica Raman. "Cuando el músculo se contrae, toda la fuerza se convierte en movimiento en esa dirección. Es un aumento enorme".
El equipo descubrió que podía utilizar el dispositivo para medir con precisión el rendimiento y la resistencia musculares. Cuando variaron la frecuencia de las contracciones musculares (por ejemplo, estimulando las bandas para que se contrajeran una vez frente a cuatro veces por segundo), observaron que los músculos se "cansaban" a frecuencias más altas y no generaban tanta tracción.
"Observar lo rápido que se cansan nuestros músculos y cómo podemos ejercitarlos para que tengan respuestas de alta resistencia es lo que podemos descubrir con esta plataforma", afirma Raman.
Los investigadores están adaptando y combinando flexiones para construir robots precisos, articulados y fiables, impulsados por músculos naturales.
"Un ejemplo de robot que estamos intentando construir en el futuro es un robot quirúrgico que pueda realizar procedimientos mínimamente invasivos dentro del cuerpo", dice Raman. "Técnicamente, los músculos pueden propulsar robots de cualquier tamaño, pero nos entusiasma especialmente la fabricación de robots pequeños, ya que es aquí donde los actuadores biológicos sobresalen en términos de fuerza, eficacia y adaptabilidad."
###
Escrito por Jennifer Chu, MIT News
Articulos Electrónica Relacionados
- ¿Son los piezoeléctricos la cl... California y Europa están bombeando millones para el desarrollo de caminos que generen electricidad usando piezoeléctricos. Los piezos tambi&eacut...
- Inteligencia Artificial para l... El centro tecnológico Tekniker, miembro de Basque Research and Technology Alliance (BRTA), ha utilizado técnicas de IA en el marco del proyecto Ecopool con el o...
- Avances de las baterías de gra... Utilizar el grafeno para mejorar el rendimiento de los dispositivos de almacenamiento de energía ha sido un objetivo clave desde que se aisló el material 2D. Ta...
- Centro de innovación y vivero ... Würth Elektronik se ha unido al grupo de organizaciones que apoyan el nuevo MakerSpace dirigido por la organización sin ánimo de lucro UnternehmerTUM GmbH de Su...
- Autocits probará la conducción... Indra lidera uno de los primeros proyectos que van a probar la conducción autónoma en las carreteras europeas, en concreto en las áreas met...
- Más de 300 millones de vehícul... IDTechEx acaba de terminar un importante estudio sobre los vehículos híbridos medios de 48V, "Mild Hybrid Vehicles 48V 2016-2031". Afirma que, a p...
- Oportunidades de crecimiento p... En 2022, el mercado de los aerogeles dio un gran salto adelante con el éxito de las baterías para vehículos eléctricos (VE) como aplicación. El crecimiento hist...
- Los VE bidireccionales se conv... A medida que los vehículos eléctricos (VE) siguen remodelando el panorama automovilístico, la integración de la tecnología de vehículo a red (V2G) ofrece un pot...
- AIMPLAS coordina un proyecto p... Hoy en día, el destino más común para las baterías de ion litio (LIBs), que se emplean tanto en aparatos electrónicos, como móviles y ordenadores, y en la movil...
- Láminas inteligentes para alta... Los profesores Stefan Seelecke y Paul Motzki de la Universidad de Saarland están desarrollando materiales inteligentes que abren nuevas vías en la tecnología de...
- Proyecto europeo para desarrol... El proyecto THERMOBAT (A Ferrosilicon Latent Heat Thermophotovoltaic Battery), coordinado por investigadores del Instituto de Energía Solar de la Universidad Po...
- Un sistema entrena a los drone... Si sigue las carreras de drones autónomos, es probable que recuerde las caídas tanto como las victorias. En las carreras de drones, los equipos compiten para ve...