Control de motor eficiente usando el MCU RA6T2 y un CI sensor de posición inductivo

En la actualidad, el encóder óptico y el encóder magnético se utilizan habitualmente para el posicionamiento en aplicaciones que utilizan motores. Entre ellas se incluyen campos de aplicación industrial como la robótica o los equipos médicos. El encóder óptico tiene alta resolución y precisión, pero suele ser más caro y no muy resistente a entornos adversos con calor, polvo y aceite. El encóder magnético presenta una buena resistencia a estos entornos, pero su coste total es elevado debido a la necesidad de blindaje para evitar el ruido magnético.
Además, sus limitaciones de precisión no hacen que esta solución sea viable para motores con un gran número de pares de polos. Su sensibilidad a los campos parásitos hace que esta solución no sea adecuada para trabajar muy cerca del motor.
La tecnología de detección de posición inductiva desarrollada por Renesas permite a los clientes diseñar el sensor en torno al motor, lo que les permite adaptar el número de sectores a los pares de polos del motor para maximizar la precisión. Esto permite tanto el posicionamiento fuera del eje (a través del eje y del eje lateral) como dentro del eje. Además, tiene un coste económico y es compacto, al tiempo que ofrece más tolerancia a entornos adversos que los encoders existentes.
Este artículo presenta un entorno de evaluación para motores de corriente continua sin escobillas (BLDC) que utiliza circuitos integrados de sensores de posición inductivos basados en la tecnología de detección de posición inductiva de Renesas. Utiliza el kit de evaluación MCK-RA6T2 (Figura 1) que cualquiera puede adquirir en la web y que puede utilizarse para evaluar inmediatamente las ventajas de la solución. Además de presentar el entorno de evaluación, este artículo también describirá las características del MCU y el sensor inductivo de detección de posición implementados en cada kit de evaluación, así como las ventajas de utilizar un sensor inductivo de detección de posición.
Presentación del kit de control de motores MCK-RA6T2
El MCK-RA6T2 es un kit de desarrollo de control de motores que permite evaluar fácilmente el control de motores BLDC. El MCU implementado en el kit es el RA6T2, que forma parte de la familia RA de MCU especializados en aplicaciones de control de motores. Con este kit y el código de ejemplo que puede descargarse del sitio web de Renesas, los usuarios pueden empezar a evaluar el control de motores utilizando el RA6T2 de inmediato.
Presentación del kit de sensor de posición inductivo IPS2200
El kit de sensor de posición inductivo (IPS2200STKIT) es un kit de evaluación compacto e intuitivo que permite una evaluación rápida y sencilla del IPS2200, que es un sensor de posición inductivo industrial de Renesas para la conmutación de motores de alta velocidad. Este kit de evaluación consta principalmente de una placa de comunicación y un módulo de aplicación. El módulo de aplicación IPS2200 está diseñado para conectarse directamente a un motor eléctrico y proporcionar 4 periodos de señales analógicas sinusoidales y cosenoidales por revolución mecánica.
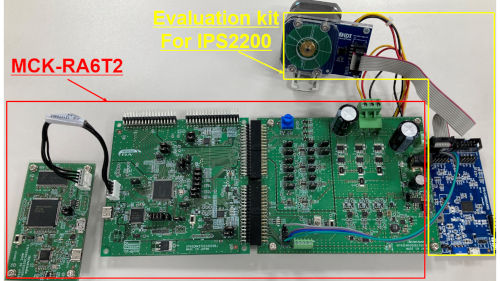
Figura 1: Entorno de evaluación del motor BLDC con el CI sensor de posición inductivo
Presentación del grupo de MCU RA6T2 dentro de la familia RA
El RA6T2 es el segundo producto ASSP de la familia RA y está orientado a soluciones de control de motores e inversores. Combina un núcleo Arm Cortex®-M33 con aceleradores de hardware dedicados para el control de motores y memoria flash de alta velocidad para un rendimiento en tiempo real a 240 MHz.
El convertidor A/D es un tipo híbrido que combina el tipo de aproximación sucesiva y el tipo ΔΣ, consiguiendo tanto una alta velocidad de muestreo de 6,25 Msps como una resolución de 16 bits. Además, incluye una función de muestreo y retención de tres derivaciones para detectar simultáneamente las corrientes de motores trifásicos. El RA6T2 también integra amplificadores de ganancia programables que permiten ajustes de ganancia según el rango de tensión de entrada, así como otras funciones analógicas. Además, el temporizador PWM ajustable y muy flexible facilita la portabilidad de algoritmos existentes al RA6T2. En cooperación con otras funciones analógicas, también proporciona una función de seguridad de corte de salida PWM, de modo que en caso de anomalía, el MCU puede realizar la detección y el corte de emergencia. Con estas funciones, un solo MCU RA6T2 puede controlar simultáneamente hasta dos motores BLDC.
El acelerador de hardware embebido incluye una unidad de función trigonométrica (TFU) y un filtro de respuesta de impulso infinito (IIR). La TFU realiza cálculos de alta velocidad sin necesidad de tablas de consulta, lo que permite un uso eficaz de la ROM. El filtro IIR ofrece métodos de ajuste de coeficientes que facilitan la portabilidad de algoritmos existentes. El RA6T2 tiene otras útiles funciones periféricas además de éstas.
Presentación del sensor de posición inductivo IPS2200
El IPS2200 sin imanes es hasta 10 veces más fino y hasta 100 veces más ligero, con velocidades eléctricas de hasta 250 krpm en comparación con los resolvers tradicionales. El factor de forma fino y ligero del sensor y su total inmunidad al campo parásitario facilitan la integración del motor y proporcionan los materiales estándar necesarios para que los clientes fabriquen su propio resolver de sustitución, lo que reduce los costes de la lista de materiales. Con su funcionamiento a cuatro o seis hilos, el IPS2200 proporciona velocidades hasta 10 veces superiores y una latencia muy baja en comparación con las soluciones basadas en resolver o magnéticas.
Características principales:
- Diseñado para uso industrial
- Amplio rango de temperaturas de funcionamiento desde -40°C a 125°C
- Interfaz: Sin/cos simple o diferencial
- Alimentación de tensión: 3,3 V ±10% o 5,0 V ±10%.
- Velocidad de rotación: hasta 250.000 rpm (eléctrica)
- Retardo de propagación: programable, <10µs
- Desajuste de ganancia sin/cos y compensación de offset
- Protección contra sobretensión, polaridad inversa y cortocircuito
- Interfaz de programación digital: I²C o SPI
Presentación del entorno de evaluación del control de motores
Como se ha mencionado en la introducción, este entorno de evaluación del motor (Figura 1) utiliza el IPS2200STKIT para obtener la información de posición del sensor de posición inductivo, mientras que el MCK-RA6T2 controla el motor utilizando la información de posición. Dado que el entorno de evaluación se construye combinando dos kits listos para usar, no es necesario que los usuarios modifiquen/desarrollen ellos mismos las placas. Esto les permite reducir considerablemente el tiempo necesario para construir un entorno de evaluación. Además, estos kits están ampliamente disponibles online a través de las empresas de la red de distribución de Renesas.
Renesas también ha publicado el programa de ejemplo para el control de motores utilizando el sensor de posición inductivo. La nota de aplicación relacionada que explica cómo utilizarlo en el MCK-RA6T2 se puede encontrar en la página del producto. El código de muestra está a disposición de todo el mundo de forma gratuita, por lo que nada impide a los usuarios poner en marcha el motor inmediatamente. Para ello, basta con flashear el programa de muestra obtenido de la web en la MCU RA6T2. Los usuarios interesados en los detalles de las variables del motor utilizadas en el programa de muestra pueden encontrar esta información consultando las notas de aplicación, que pueden considerarse una buena referencia.
Además, Renesas proporciona una exclusiva herramienta de soporte de control de motores denominada Renesas Motor Workbench para una experiencia de evaluación de motores más cómoda. Renesas Motor Workbench se proporciona de forma gratuita y puede obtenerse en el sitio web de Renesas.
En general, el diseño de soluciones de control de motores requiere muchos conocimientos técnicos. Como tal, se requieren muchas horas-hombre y costes de ajuste y depuración para adaptar la solución al propósito requerido. Para resolver este problema, Renesas Motor Workbench ofrece las siguientes funciones, que pueden reducir el esfuerzo necesario para el ajuste y la depuración (Figura 2).
- Analizador:
Lectura/escritura de variables y visualización de formas de onda en tiempo real, así como visualización de variables de control como un osciloscopio/especificación de disparo, etc.
- Sintonizador:
Los usuarios pueden simplemente introducir la corriente nominal y el logaritmo de polos del motor y pulsar el botón Start para extraer automáticamente parámetros específicos del motor, como la resistencia y la inductancia, así como parámetros de control como la ganancia PI.
Los parámetros extraídos pueden utilizarse para arrancar inmediatamente el motor o para ajustar con precisión los parámetros de control.
- GUI sencilla:
GUI incluida para un funcionamiento más intuitivo del motor.
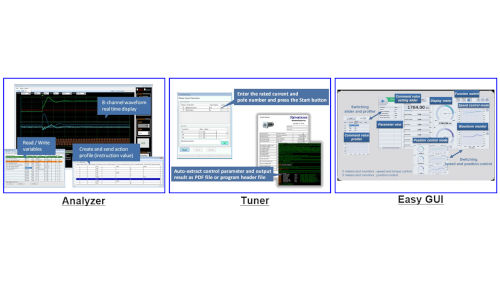
Figura 2: Características de Renesas Motor Workbench
Como referencia, la Figura 3 muestra cómo cambiar las variables de control del motor en el programa de ejemplo utilizando la función Analyzer del Renesas Motor Workbench.
Es una imagen capturada de la operación de control de posición cuando se introduce un valor de comando de posición. La información de posición, velocidad y corriente del eje q puede representarse en una forma de onda, lo que facilita la visualización del estado de funcionamiento del motor.
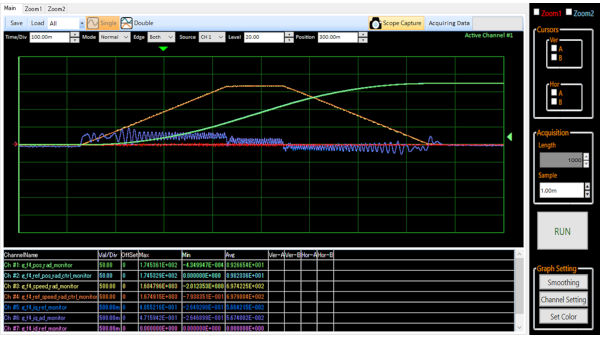
Figura 3: Imagen capturada de la operación de control de posición cuando se introduce un valor de comando de posición.
Ventajas del control de motores mediante sensores de posición inductivos
Entre las ventajas de utilizar este sensor de posición inductivo destaca su funcionalidad. El elemento sensor utilizado en este sensor puede disponerse con el mismo número de patrones de bobina que los pares de polos del motor que se va a utilizar, por lo que puede adaptarse a motores con varios pares de polos. El sustrato de la bobina del sensor inductivo de posición puede montarse en el extremo o en la base del eje, lo que proporciona una gran flexibilidad en el diseño de la maquinaria del motor.
La tecnología de detección de posición inductiva de Renesas ofrece la máxima flexibilidad y puede diseñarse en función de la aplicación del cliente. Renesas lo fomenta con diseños de referencia listos para usar, recogidos en el catálogo Resolver 4.0. Con el catálogo Resolver 4.0, los ingenieros disponen ahora de una gran variedad de diseños listos para usar basados en los sensores de conmutación de motor IPS2200, cada uno de ellos orientado a un eje de motor o a una configuración de par de polos. Los diseños de referencia incluyen esquemas completos, diseños de PCB totalmente cableados y archivos Gerber, lo que permite a los ingenieros empezar a crear inmediatamente soluciones de detección que funcionan.
Figura 4: Catálogo Resolver 4.0
Otra ventaja de esta tecnología es su resistencia medioambiental. Dado que no se utilizan imanes en el elemento sensor, es muy resistente a los campos magnéticos circundantes sin dejar de ser ligero. Además, el método sin contacto proporciona una gran resistencia al polvo y la suciedad.
Por último, otra ventaja es el bajo coste del sistema. En general, es más fácil reducir el coste total de los sensores de posición inductivos en comparación con los codificadores ópticos o magnéticos debido al número de elementos y componentes utilizados. El sensor codificador óptico es intrínsecamente más caro, mientras que el mayor coste del codificador magnético se debe a la necesidad de blindaje magnético, etc. La figura 5 compara el coste de los tres sensores de posición.
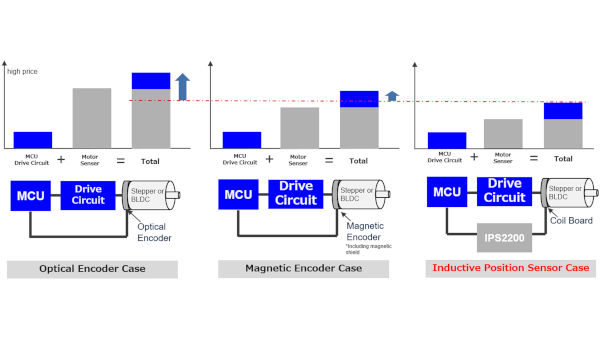
Figura 5: Comparación de los costes de los tres sensores de posición
Conclusión
Los sensores de posición inductivos pueden optimizar la precisión de la posición diseñando el sustrato de la bobina para que coincida con el motor utilizado. También tienen una alta resistencia medioambiental junto con un peso reducido para el equipo del motor. Además, los sistemas de control de motores con funciones de detección de posición pueden desarrollarse a un coste inferior en comparación con otros sensores de posición. Como resultado, el uso de este sensor se está extendiendo en aplicaciones que requieren una detección de posición de alta precisión en entornos difíciles, como motores industriales, robots y equipos médicos. Renesas ha preparado una solución de control de motores basada en su MCU RA6T2 de alto rendimiento, especializada en aplicaciones de control de motores, así como en el IPS2200, que es un CI de sensor inductivo que cualquiera puede obtener de distribuidores online. El código de muestra para este entorno de evaluación está disponible en la página de producto del RA6T2, para que los usuarios puedan empezar sus diseños de inmediato.
Además, las páginas de producto del RA6T2, que puede aplicarse a una amplia variedad de requisitos y dispositivos de control de motores, incluyen una gran cantidad de notas de aplicación y proyectos de muestra para aplicaciones de control de motores. Entre ellos se incluyen el encóder IF, el control sin sensor, el control de motores BLDC con un sensor de posición inductivo y muchos más.
Recursos:
- Nota de aplicación: RA6T2 Control vectorial para motor síncrono magnético permanente con sensor inductivo (renesas.com)
- Página web del MCK-RA6T2: RTK0EMA270S00020BJ - MCK-RA6T2 Renesas Flexible Motor Control Kit for RA6T2 MCU Group | Renesas
- Página web de IPS2200STKIT: IPS2200STKIT - Kit de evaluación para IPS2200 | Renesas
- Catálogo Resolver 4.0: Catálogo Resolver 4.0 (renesas.com)
- Página web de la MCU RA6T2: RA6T2 - 240MHz Arm® Cortex®-M33 TrustZone®, High Real-time Engine for Motor Control | Renesas
Articulos Electrónica Relacionados
- MPU de alta precisión RZ/V2L d... Mouser ya tiene en stock los microprocesadores de IA RZ/V2L de Renesas Electronics. El RZ/V2L es ideal para los ingenieros que buscan una solución de inteligenc...
- Microchip amplía su gama XLP P... Microchip anuncia la ampliación de su gama de microcontroladores XLP (eXtreme Low Power) con la familia PIC24F ‘GA3’, caracterizada por la corriente activ...
- Microcontroladores AVR® de 8 b... Microchip anuncia una nueva generación de microcontroladores tinyAVR de 8 bit. Los cuatro dispositivos tienen entre 14 y 24 patillas y 4 KB o 8 KB de Fla...
- MCUs de 16-Bit y baja potencia... Renesas Electronics presenta la gama de microcontroladores de 16 bits RL78 / F15 de baja potencia para los sistemas de control en vehículos, como l...
- Microcontroladores PIC18 con u... Microchip anuncia la familia PIC18F “K42”, que combina un gran número de periféricos independientes del núcleo (Core Independen...
- Renesas Electronics amplía su ... Renesas Electronics ha ampliado su familia de microcontroladores (MCU) RX600 con el nuevo grupo RX62G de 32 bits. Estos MCU están optimizados para aplicac...
- Nuevas familias Microchip PIC®... Tanto si se utiliza como introducción en el desarrollo embebido, como controlador principal de una aplicación conectada o como componente adiciona...
- MCUs Renesas RA6E1 basado en A... Renesas Electronics Corporation ha presentado un nuevo grupo de microcontroladores (MCU) de 32 bits de su familia RA. Los nuevos MCU RA6E1, basados en el núcleo...
- MCU Maxim MAX32652 de ultra ba... Mouser Electronics, Inc. está distribuyendo el microcontrolador MAX32652 de ultra-baja potencia de Maxim Integrated. Ofreciendo a los diseñadores ...
- Renesas Electronics se asocia ... Renesas Electronics ha anunciado el primer paso de una solución de gestión del ciclo de vida de seguridad en la plataforma Renesas Synergy ™...
- Microcontroladores eXtreme Low... Microchip anuncia la ampliación de su catálogo de microcontroladores eXtreme Low Power (XLP) PIC®. Entre las características de la nuev...
- Microcontroladores MCX de NXP ... Mouser Electronics, Inc ya distribuye los microcontroladores (MCU) industriales y de IoT MCX de NXP Semiconductors. Estos MCU nuevos son microcontroladores de a...