Ingenieros diseñan un sistema modular para fabricar robots acuáticos eficientes y escalables

Las estructuras submarinas que pueden cambiar de forma dinámicamente, como hacen los peces, se desplazan por el agua con mucha más eficacia que los cascos rígidos convencionales. Pero construir dispositivos deformables que puedan cambiar la curva de la forma de su cuerpo manteniendo un perfil liso es un proceso largo y difícil. El RoboTuna del MIT, por ejemplo, estaba compuesto por unas 3.000 piezas diferentes y tardó unos dos años en diseñarse y construirse.
Ahora, los investigadores del MIT y sus colegas -entre ellos uno del equipo del RoboTuna original- han ideado un planteamiento innovador para construir robots submarinos deformables, utilizando subestructuras simples que se repiten en lugar de componentes únicos. El equipo ha demostrado el nuevo sistema en dos configuraciones de ejemplo diferentes, una como una anguila y la otra como un hidroala con alas. El principio en sí, sin embargo, permite variaciones prácticamente ilimitadas de forma y escala, afirman los investigadores.
El trabajo se publica en la revista Soft Robotics, en un artículo del asistente de investigación del MIT Alfonso Parra Rubio, los profesores Michael Triantafyllou y Neil Gershenfeld, y otras seis personas.
Los enfoques existentes de la robótica blanda para aplicaciones marinas se hacen generalmente a pequeña escala, mientras que muchas aplicaciones útiles del mundo real requieren dispositivos a escala de metros. El nuevo sistema modular que proponen los investigadores podría ampliarse fácilmente a esos tamaños y más, sin requerir el tipo de reequipamiento y rediseño que sería necesario para ampliar los sistemas actuales.
"La escalabilidad es un punto fuerte para nosotros", afirma Parra Rubio. Dada la baja densidad y la alta rigidez de las piezas en forma de celosía, llamadas vóxeles, que componen su sistema, "tenemos más margen para seguir ampliando", mientras que la mayoría de las tecnologías utilizadas actualmente "se basan en materiales de alta densidad que se enfrentan a problemas drásticos" para pasar a tamaños mayores.
Los voxels individuales de los dispositivos experimentales de prueba de concepto del equipo son en su mayoría estructuras huecas formadas por piezas de plástico fundido con puntales estrechos de formas complejas. Las formas de caja soportan la carga en una dirección pero son blandas en otras, una combinación poco habitual que se consigue mezclando componentes rígidos y flexibles en distintas proporciones.
"Tratar la robótica blanda frente a la dura es una falsa dicotomía", afirma Parra Rubio. "Esto es algo intermedio, una nueva forma de construir cosas". Gershenfeld, director del Centro de Bits y Átomos del MIT, añade que "ésta es una tercera vía que casa los mejores elementos de ambas".
"La suave flexibilidad de la superficie del cuerpo nos permite aplicar un control del flujo capaz de reducir la resistencia y mejorar la eficacia propulsora, lo que se traduce en un ahorro sustancial de combustible", afirma Triantafyllou, catedrático Henry L. y Grace Doherty de Ciencias e Ingeniería Oceánicas, que formó parte del equipo de RoboTuna.
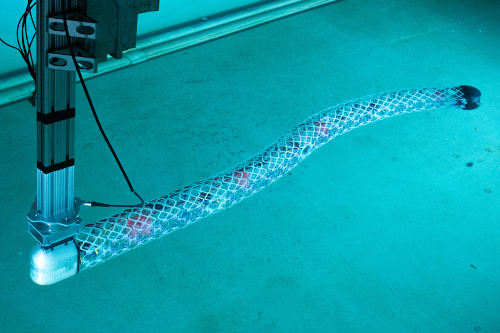
En uno de los dispositivos fabricados por el equipo, los vóxeles están unidos de extremo a extremo en una larga hilera para formar una estructura de un metro de largo con forma de serpiente. El cuerpo se compone de cuatro segmentos, cada uno de ellos formado por cinco voxels, con un actuador en el centro que puede tirar de un cable unido a cada uno de los dos voxels de cada lado, contrayéndolos y haciendo que la estructura se doble. Toda la estructura de 20 unidades se cubre con una estructura de soporte en forma de costilla y, a continuación, con una piel de neopreno impermeable y ajustada. Los investigadores desplegaron la estructura en un tanque de remolque del MIT para mostrar su eficacia en el agua, y demostraron que, efectivamente, era capaz de generar un empuje hacia delante suficiente para impulsarse mediante movimientos ondulantes.
"Ya ha habido muchos robots con forma de serpiente", afirma Gershenfeld. "Pero generalmente están hechos de componentes a medida, a diferencia de estos sencillos bloques de construcción que son escalables".
Por ejemplo, dice Parra Rubio, un robot similar a una serpiente construido por la NASA estaba formado por miles de piezas únicas, mientras que en el caso de la serpiente de este grupo, "demostramos que hay unas 60 piezas." Y en comparación con los dos años invertidos en diseñar y construir el RoboTuna del MIT, este dispositivo se montó en unos dos días, dice.
El otro dispositivo que demostraron es una forma parecida a un ala, o hidroala, compuesta por una matriz de los mismos vóxeles pero capaz de cambiar la forma de su perfil y, por tanto, controlar la relación sustentación-arrastre y otras propiedades del ala. Estas formas de ala podrían utilizarse para diversos fines, desde generar energía a partir de las olas hasta ayudar a mejorar la eficiencia de los cascos de los barcos, una demanda acuciante, ya que el transporte marítimo es una fuente importante de emisiones de carbono.
La forma del ala, a diferencia de la serpiente, está recubierta de un conjunto de baldosas superpuestas similares a escamas, diseñadas para presionarse entre sí y mantener un sellado impermeable incluso cuando el ala cambia de curvatura. Una posible aplicación podría ser la incorporación de algún tipo de aditamento al perfil del casco de un barco que redujera la formación de remolinos inductores de resistencia y mejorara así su eficiencia general, una posibilidad que el equipo está estudiando con colaboradores del sector naval.
En última instancia, el concepto podría aplicarse a una nave sumergible similar a una ballena, utilizando la forma morfable de su cuerpo para crear propulsión. Una nave así podría evitar el mal tiempo manteniéndose bajo la superficie, pero sin el ruido y las turbulencias de la propulsión convencional. El concepto también podría aplicarse a partes de otras embarcaciones, como los yates de carreras, en los que tener una quilla o un timón que pudiera curvarse suavemente durante un giro en lugar de permanecer recto podría proporcionar una ventaja adicional. "En lugar de ser rígido o tener sólo un alerón, si se puede curvar como lo hacen los peces, se puede tomar la curva de forma mucho más eficiente", afirma Gershenfeld.
El equipo de investigación estaba formado por Dixia Fan, de la Universidad de Westlake (China); Benjamin Jenett SM '15, PhD ' 20, de Discrete Lattice Industries; José del Águila Ferrandis, Amira Abdel-Rahman y David Preiss, del MIT; y Filippos Tourlomousis, del Centro de Investigación Demokritos de Grecia. El trabajo ha contado con el apoyo del Laboratorio de Investigación del Ejército de EE.UU., la financiación del Consorcio CBA y el Programa Sea Grant del MIT.
David L. Chandler, MIT News Office
Articulos Electrónica Relacionados
- Robot educativo MekaMon Berser... RS Components (RS) presenta la versión 2 del robot educativo MekaMon Berserker de Reach Robotics, que además de ser el primer robot de juegos es ideal para inge...
- Facilitar el desarrollo de ser... Si nos remontamos a muchas generaciones atrás, parece que nuestra sociedad encuentra el tema de la robótica inusualmente apasionante. Los autómatas rudimentario...
- Plataforma de control de robot... La plataforma OmniCore supone un cambio radical hacia una arquitectura de control modular y preparada para el futuro que permitirá la integración total de siste...
- El viaje de un innovador: inic... A pocos kilómetros al norte del aeropuerto londinense de Heathrow, encontrará un semillero de innovación. En los años sesenta, el centro de Hayes, en el oeste d...
- Los robots autónomos de seguri... Knightscope, empresa tecnológica de seguridad pública, está especializada en la combinación de robótica, tecnología de conducción automática, electrificación de...
- Estación de robótica colaborat... Festo y Universal Robots se unen para crear una nueva estación colaborativa, con el objetivo de impulsar la automatización y la robótica en las aulas y formar a...
- Pinzas personalizables para ro... On Robot presenta su nuevo modelo de pinza flexible y de bajo consumo para cobots encargados de manipular objetos de diferentes tamaños – la RG6.F&...
- Kit Intel IoT RFP para consoli... congatec presenta su nuevo kit de consolidación de carga de trabajo para la conciencia situacional basada en la visión que Intel califica como Intel IoT RFP (Re...
- Robots de seguridad autónomos ... Mejorar tanto la vigilancia como la posterior interdicción de las amenazas a la seguridad percibidas es fundamental para una aplicación eficaz de la ley. El obj...
- Controlador Omron NJ501-R con ... OMRON Corporation anuncia el lanzamiento del primer «controlador con la robótica integrada». El nuevo controlador NJ501-R se basa en la serie de controladores d...
- Cobot Igus ReBeL con un engran... El nuevo ReBeL de igus es un cobot de plástico de solo 10 kg que hace viables nuevas ideas innovadoras en materia de robótica de servicio para las start-ups y p...
- Brazos robóticos biónicos tan ... Músculos y nervios artificiales fabricados con una aleación de níquel y titanio con memoria de forma están haciendo brazos robóticos tan flexibles y ágiles como...