Un sistema entrena a los drones para que vuelen alrededor de los obstáculos a gran velocidad

Si sigue las carreras de drones autónomos, es probable que recuerde las caídas tanto como las victorias. En las carreras de drones, los equipos compiten para ver qué vehículo está mejor entrenado para volar más rápido a través de una pista de obstáculos. Pero cuanto más rápido vuelan los drones, más inestables se vuelven, y a altas velocidades su aerodinámica puede ser demasiado complicada de predecir. Por tanto, los accidentes son habituales y a menudo espectaculares.
Pero si se consigue que sean más rápidos y ágiles, los drones podrían utilizarse en operaciones de tiempo crítico más allá del circuito de carreras, por ejemplo para buscar supervivientes en una catástrofe natural.
Ahora, los ingenieros aeroespaciales del MIT han ideado un algoritmo que ayuda a los drones a encontrar la ruta más rápida para sortear los obstáculos sin estrellarse. El nuevo algoritmo combina simulaciones de un dron que vuela por una pista de obstáculos virtual con datos de experimentos de un dron real que vuela por la misma pista en un espacio físico.
Los investigadores descubrieron que un dron entrenado con su algoritmo volaba a través de una simple pista de obstáculos hasta un 20 por ciento más rápido que un dron entrenado con algoritmos de planificación convencionales. Curiosamente, el nuevo algoritmo no siempre mantuvo al dron por delante de su competidor durante todo el recorrido. En algunos casos, optó por reducir la velocidad de un dron para afrontar una curva complicada, o ahorrar su energía para acelerar y, finalmente, superar a su rival.
"A altas velocidades, hay una intrincada aerodinámica que es difícil de simular, así que utilizamos experimentos en el mundo real para rellenar esos agujeros negros y descubrir, por ejemplo, que podría ser mejor reducir la velocidad primero para ser más rápido después", comenta Ezra Tal, estudiante de posgrado en el Departamento de Aeronáutica y Astronáutica del MIT. "Es este enfoque holístico que utilizamos para ver cómo podemos hacer una trayectoria en general lo más rápida posible".
"Este tipo de algoritmos son un paso muy valioso para hacer posible que los futuros drones puedan navegar por entornos complejos con gran rapidez", añade Sertac Karaman, profesor asociado de aeronáutica y astronáutica, y director del Laboratorio de Sistemas de Información y Decisión del MIT. "Realmente esperamos ampliar los límites de manera que puedan viajar tan rápido como sus límites físicos lo permitan".
Tal, Karaman y el estudiante de posgrado del MIT Gilhyun Ryou han publicado sus resultados en el International Journal of Robotics Research.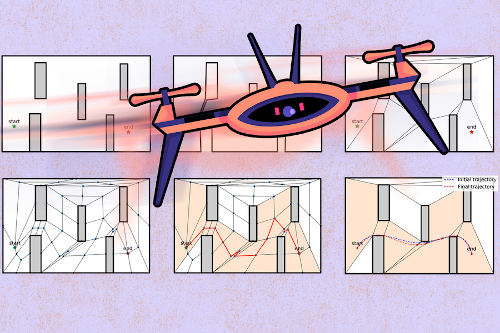
Efectos rápidos
Entrenar a los drones para que vuelen alrededor de los obstáculos es relativamente sencillo si están destinados a volar lentamente. Esto se debe a que los efectos aerodinámicos, como la resistencia, no suelen entrar en juego a bajas velocidades y pueden omitirse en cualquier modelización del comportamiento de un dron. Pero a altas velocidades, estos efectos son mucho más pronunciados, y es mucho más difícil predecir cómo se comportarán los vehículos.
"Cuando vuelas rápido, es difícil estimar dónde estás", afirma Ryou. "Puede haber retrasos en el envío de una señal a un motor, o una repentina caída de tensión que podría causar otros problemas de dinámica. Estos efectos no pueden modelarse con los enfoques de planificación tradicionales".
Para entender cómo afecta la aerodinámica de alta velocidad a los drones en vuelo, los investigadores tienen que realizar muchos experimentos en el laboratorio, poniendo los drones a distintas velocidades y trayectorias para ver cuáles vuelan rápido sin estrellarse, un proceso de entrenamiento caro y que a menudo provoca accidentes.
En cambio, el equipo del MIT ha desarrollado un algoritmo de planificación de vuelos de alta velocidad que combina simulaciones y experimentos, de forma que se minimiza el número de experimentos necesarios para identificar trayectorias de vuelo rápidas y seguras.
Los investigadores empezaron con un modelo de planificación de vuelos basado en la física, que desarrollaron para simular primero cómo es probable que se comporte un dron mientras vuela por una pista de obstáculos virtual. Simularon miles de escenarios de carrera, cada uno con una trayectoria de vuelo y un patrón de velocidad diferentes. A continuación, calcularon si cada escenario era factible (seguro) o inviable (con resultado de accidente). A partir de este gráfico, pudieron seleccionar rápidamente un puñado de escenarios, o trayectorias de carrera, más prometedores para probarlos en el laboratorio.
"Podemos hacer esta simulación de baja fidelidad de forma barata y rápida, para ver las trayectorias interesantes que podrían ser rápidas y factibles. Luego volamos estas trayectorias en experimentos para ver cuáles son realmente factibles en el mundo real", dice Tal. "En última instancia convergemos a la trayectoria óptima que nos da el menor tiempo factible".
Ir despacio para ir rápido
Para demostrar su nuevo enfoque, los investigadores simularon un dron volando a través de un recorrido sencillo con cinco grandes obstáculos de forma cuadrada dispuestos en una configuración escalonada. Montaron esta misma configuración en un espacio físico de entrenamiento y programaron un dron para que volara por el recorrido a las velocidades y trayectorias que previamente habían elegido en sus simulaciones. También realizaron el mismo recorrido con un dron entrenado con un algoritmo más convencional que no incorpora experimentos en su planificación.
En general, el dron entrenado con el nuevo algoritmo "ganó" todas las carreras, completando el recorrido en menos tiempo que el dron entrenado de forma convencional. En algunos casos, el dron ganador terminó el recorrido un 20 por ciento más rápido que su competidor, a pesar de que tomó una trayectoria con una salida más lenta, por ejemplo, tardando un poco más en tomar una curva. El dron entrenado de forma convencional no realizó este tipo de ajustes sutiles, probablemente porque sus trayectorias, basadas únicamente en simulaciones, no podían tener en cuenta del todo los efectos aerodinámicos que los experimentos del equipo revelaron en el mundo real.
Los investigadores tienen previsto realizar más experimentos, a mayor velocidad y en entornos más complejos, para seguir mejorando su algoritmo. También podrían incorporar los datos de vuelo de los pilotos humanos que pilotan los drones a distancia, y cuyas decisiones y maniobras podrían ayudar a definir planes de vuelo aún más rápidos y factibles.
"Si un piloto humano disminuye o aumenta la velocidad, eso podría informar de lo que hace nuestro algoritmo", dice Tal. También podemos utilizar la trayectoria del piloto humano como punto de partida y mejorar a partir de ella, para ver qué es lo que los humanos no hacen y que nuestro algoritmo puede averiguar para volar más rápido". Esas son algunas de las ideas futuras en las que estamos pensando".
Esta investigación fue apoyada en parte por la Oficina de Investigación Naval.
###
Escrito por Jennifer Chu, Oficina de Noticias del MIT
Articulos Electrónica Relacionados
- Un conjunto de nuevas aplicaci... Se prevé que el mercado emergente de semiconductores de potencia de carburo de silicio (SiC) y nitruro de galio (GaN) crezca en un factor de 17, durante los pró...
- Propulsor eléctrico para camio... En 2021, Nikola Motor Company lanzará al mercado el Nikola One and Two, una línea de camiones de hidrógeno de clase 8 que ofrecerá m...
- Método para estimar la eficien... La colaboración entre la Universidad Politécnica de Madrid (UPM) y el Consejo Superior de Investigaciones Científicas (CSIC) ha dado como r...
- Centro de innovación y vivero ... Würth Elektronik se ha unido al grupo de organizaciones que apoyan el nuevo MakerSpace dirigido por la organización sin ánimo de lucro UnternehmerTUM GmbH de Su...
- AIMPLAS inicia 12 nuevos proye... Recuperar y reciclar materias primas críticas (Critical Raw Material o CRM por sus siglas en inglés), tan valiosas y esenciales hoy en día para la producción de...
- Desarrollo de electrolizadores... El grupo global de ingeniería SEGULA Technologies lidera el proyecto “3+2 Hyer: Desarrollo de modelos para aumentar la eficiencia de los electrolizadores" finan...
- ¿Qué podemos esperar de los nu... La energía renovable es la clave para la descarbonización y un planeta más sostenible. Las turbinas eólicas y los paneles solares son solo dos de las formas en ...
- Transporte naval eléctrico 201... Los analistas de IDTechEx han publicado un nuevo informe, "Electric Boats and Ships 2017-2027" analizando este sector fragmentado, pero a menudo muy rentable y ...
- Un nuevo chip para descodifica... Imagine que utiliza una aplicación de banca electrónica para ingresar dinero en su cuenta. Como toda la información que se envía por Internet, esas comunicacion...
- Nuevos avances en la integraci... La integración de la electrónica en molde IME (In Mold Electronics) es una nueva forma revolucionaria de integrar la electrónica en los plásticos durante el pro...
- Las ventas de Sensores / Actua... Después de varios años de tasas de crecimiento bajas e incoherentes, debido principalmente a la intensa presión de precios, el mercado de s...
- MACOM y STMicroelectronics ace... MACOM Technology Solutions Holdings, Inc. y STMicroelectronics han anunciado la ampliación la capacidad de producción GaN-en-Silicio de 150 mm en 2019 en las ...