Mano robótica que puede identificar objetos con un solo gesto

Inspirándose en el dedo humano, investigadores del MIT han desarrollado una mano robótica que utiliza sensores táctiles de alta resolución para identificar con precisión un objeto tras agarrarlo una sola vez.
Muchas manos robóticas colocan todos sus potentes sensores en las puntas de los dedos, de modo que un objeto debe estar en pleno contacto con ellas para ser identificado, lo que puede requerir varios agarres.
Otros diseños utilizan sensores de menor resolución repartidos por todo el dedo, pero no captan tantos detalles, por lo que a menudo es necesario volver a agarrar varias veces.
En su lugar, el equipo del MIT construyó un dedo robótico con un esqueleto rígido envuelto en una capa exterior blanda que lleva incorporados múltiples sensores de alta resolución bajo su "piel" transparente. Los sensores, que utilizan una cámara y LED para recoger información visual sobre la forma de un objeto, proporcionan una detección continua a lo largo de todo el dedo. Cada dedo capta simultáneamente una gran cantidad de datos sobre muchas partes de un objeto.
Con este diseño, los investigadores construyeron una mano robótica de tres dedos capaz de identificar objetos tras un solo agarre, con una precisión del 85%. El esqueleto rígido hace que los dedos sean lo bastante fuertes para coger un objeto pesado, como un taladro, mientras que la piel blanda les permite agarrar con seguridad un objeto flexible, como una botella de plástico vacía, sin aplastarlo.
Estos dedos blandos y rígidos podrían ser especialmente útiles en un robot de asistencia domiciliaria diseñado para interactuar con personas mayores. El robot podría levantar un objeto pesado de una estantería con la misma mano con la que ayuda al anciano a bañarse.
"Tener elementos blandos y rígidos es muy importante en cualquier mano, pero también lo es poder realizar una gran detección en un área realmente grande, sobre todo si queremos plantearnos hacer tareas de manipulación muy complicadas como las que pueden hacer nuestras propias manos. Nuestro objetivo con este trabajo era combinar todas las cosas que hacen que nuestras manos humanas sean tan buenas en un dedo robótico capaz de realizar tareas que otros dedos robóticos no pueden hacer actualmente", dice la estudiante de ingeniería mecánica Sandra Liu, coautora de un artículo de investigación sobre el dedo robótico.
Liu escribió el artículo con el coautor principal y estudiante de ingeniería mecánica Leonardo Zamora Yañez y su asesor, Edward Adelson, Catedrático John y Dorothy Wilson de Ciencias de la Visión en el Departamento de Ciencias Cognitivas y del Cerebro y miembro del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL). La investigación se presentará en la Conferencia RoboSoft.
 Un dedo inspirado en el ser humano
Un dedo inspirado en el ser humano
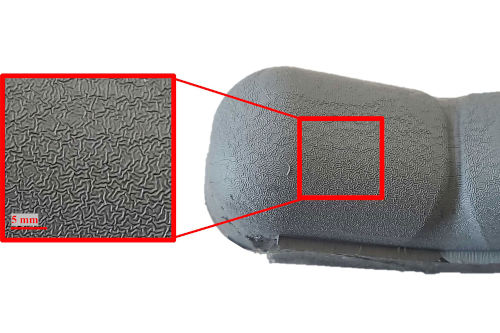
El dedo robótico se compone de un endoesqueleto rígido impreso en 3D que se coloca en un molde y se envuelve en una "piel" de silicona transparente. La fabricación del dedo en un molde elimina la necesidad de sujetadores o adhesivos para mantener la silicona en su sitio.
Los investigadores diseñaron el molde con una forma curvada para que los dedos robóticos estén ligeramente curvados cuando están en reposo, igual que los dedos humanos.
"La silicona se arruga cuando se dobla, así que pensamos que si teníamos el dedo moldeado en esta posición curvada, al curvarlo más para agarrar un objeto, no se inducirían tantas arrugas. Las arrugas son buenas en cierto modo -pueden ayudar a que el dedo se deslice por las superficies con mucha suavidad y facilidad-, pero no queríamos arrugas que no pudiéramos controlar", dice Liu.
El endoesqueleto de cada dedo contiene un par de sensores táctiles detallados, conocidos como sensores GelSight, incrustados en las secciones superior y media, bajo la piel transparente. Los sensores están colocados de forma que el alcance de las cámaras se solapa ligeramente, lo que proporciona al dedo una detección continua en toda su longitud.
El sensor GelSight, basado en una tecnología pionera del grupo Adelson, está compuesto por una cámara y tres LED de colores. Cuando el dedo agarra un objeto, la cámara capta imágenes mientras los LED de colores iluminan la piel desde el interior.
A partir de los contornos iluminados que aparecen en la piel blanda, un algoritmo realiza cálculos retrospectivos para cartografiar los contornos en la superficie del objeto agarrado. Los investigadores entrenaron un modelo de aprendizaje automático para identificar objetos a partir de los datos brutos de la imagen de la cámara.
Al perfeccionar el proceso de fabricación del dedo, los investigadores se toparon con varios obstáculos.
En primer lugar, la silicona tiende a despegarse de las superficies con el tiempo. Liu y sus colaboradores descubrieron que podían limitar este desprendimiento añadiendo pequeñas curvas a lo largo de las bisagras entre las articulaciones del endoesqueleto.
Cuando el dedo se dobla, la flexión de la silicona se distribuye a lo largo de las pequeñas curvas, lo que reduce la tensión y evita el desprendimiento. También añadieron pliegues a las articulaciones para que la silicona no se aplastara tanto al doblarse el dedo.
Mientras resolvían los problemas de su diseño, los investigadores se dieron cuenta de que las arrugas de la silicona evitan que la piel se desgarre.
"La utilidad de las arrugas fue un descubrimiento accidental por nuestra parte. Cuando las sintetizamos en la superficie, descubrimos que hacían que el dedo fuera más duradero de lo que esperábamos", explica.
Conseguir un buen agarre
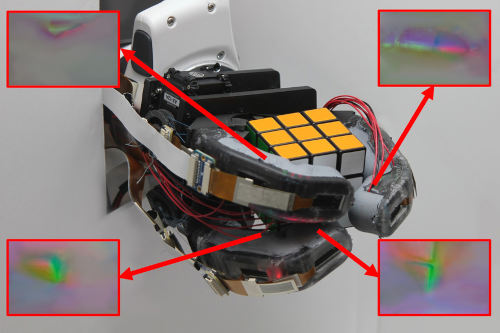
Una vez perfeccionado el diseño, los investigadores construyeron una mano robótica con dos dedos dispuestos en forma de Y y un tercer dedo como pulgar opuesto. La mano capta seis imágenes cuando agarra un objeto (dos de cada dedo) y las envía a un algoritmo de aprendizaje automático que las utiliza para identificar el objeto.
Como la mano tiene sensores táctiles en todos los dedos, puede recopilar muchos datos táctiles de un solo agarre.
"Aunque tenemos muchos sensores en los dedos, quizá añadir una palma con sensores ayudaría a distinguir mejor los objetos táctiles", afirma Liu.
En el futuro, los investigadores también quieren mejorar el hardware para reducir el desgaste de la silicona con el paso del tiempo y añadir más accionamientos al pulgar para que pueda realizar una mayor variedad de tareas.
Este trabajo ha sido financiado en parte por el Instituto de Investigación Toyota, la Oficina de Investigación Naval y el proyecto SINTEF BIFROST.
Autor: Adam Zewe, MIT News Office
Articulos Electrónica Relacionados
- Elección y uso de robots de un... Un robot industrial puede ser tan sencillo como un robot de un solo eje en lo que se refiere al transporte y el posicionamiento básicos, o puede ampliarse a var...
- Los robots autónomos de seguri... Knightscope, empresa tecnológica de seguridad pública, está especializada en la combinación de robótica, tecnología de conducción automática, electrificación de...
- El viaje de un innovador: inic... A pocos kilómetros al norte del aeropuerto londinense de Heathrow, encontrará un semillero de innovación. En los años sesenta, el centro de Hayes, en el oeste d...
- Robots de seguridad autónomos ... Mejorar tanto la vigilancia como la posterior interdicción de las amenazas a la seguridad percibidas es fundamental para una aplicación eficaz de la ley. El obj...
- Nueva Robótica: Modificando mo... Los fabricantes de máquinas en muchos mercados establecidos venden sus máquinas directamente a través de las redes de distribuidores. A veces, crean flujos de i...
- Los módulos de potencia de alt... Vicor Corporatio entrevista a OLogic, un grupo dedicado al diseño y el desarrollo integral de robótica, en el podcast Vicor Powering Innovation. OLogic ayuda a ...
- Robot pintor didáctico Cebekit amplía su familia de equipos didácticos y entretenimiento con el robot pintor C-9805, un dispositivo que consigue dibujar y pintar de form...
- Resolver los retos de la pizze... Imagine a un pizzero trabajando con una bola de masa. Puede utilizar una espátula para levantar la masa sobre una tabla de cortar y luego utilizar un rodillo pa...
- Robot para soldadura Thermaltr... El sistema robótico de Thermaltronics incorpora conceptos de diseño innovadores y componentes de precisión para garantizar la precisi&oacut...
- Solución de movilidad para rob... Nutai, Universal Robots y Festo han desarrollado Multi Axis Drive Controller con la certificación oficial como componente UR+ de Universal Robots. El controlado...
- Estación de robótica colaborat... Festo y Universal Robots se unen para crear una nueva estación colaborativa, con el objetivo de impulsar la automatización y la robótica en las aulas y formar a...
- Un robot que detecta objetos o... En los últimos años, los robots han adquirido visión artificial, tacto e incluso olfato. "Los investigadores han dotado a los robots de una percepción similar a...