Un robot que detecta objetos ocultos

En los últimos años, los robots han adquirido visión artificial, tacto e incluso olfato. "Los investigadores han dotado a los robots de una percepción similar a la humana", afirma el profesor asociado del MIT Fadel Adib. En un nuevo artículo, el equipo de Adib lleva la tecnología un paso más allá. "Intentamos dotar a los robots de una percepción sobrehumana", afirma.
Los investigadores han desarrollado un robot que utiliza ondas de radio, que pueden atravesar las paredes, para percibir ocultos. El robot, llamado RF-Grasp, combina esta potente detección con la visión por ordenador más tradicional para localizar y sujetar objetos que, de otro modo, quedarían ocultos. Este avance podría agilizar algún día el cumplimiento del comercio electrónico en los almacenes o ayudar a una máquina a sacar un destornillador de una caja de herramientas desordenada.
La investigación se presentará en mayo en la Conferencia Internacional de Robótica y Automatización del IEEE. La autora principal del artículo es Tara Boroushaki, asistente de investigación del Grupo de Cinética de Señales del MIT Media Lab. Sus coautores en el MIT son Adib, director del Grupo de Cinética de Señales, y Alberto Rodríguez, profesor asociado de la promoción de 1957 del Departamento de Ingeniería Mecánica. Otros coautores son Junshan Leng, ingeniero de investigación de la Universidad de Harvard, e Ian Clester, estudiante de doctorado en Georgia Tech.
Mientras el comercio electrónico sigue creciendo, el trabajo en los almacenes sigue siendo normalmente el dominio de los humanos, no de los robots, a pesar de las condiciones de trabajo a veces peligrosas. Esto se debe, en parte, a que los robots tienen dificultades para localizar y sujetar objetos en un entorno tan abarrotado. "La percepción y el picking son dos de los obstáculos que tiene el sector hoy en día", afirma Rodríguez. Sólo con la visión óptica, los robots no pueden percibir la presencia de un artículo guardado en una caja o escondido detrás de otro objeto en la estantería: las ondas de luz visibles, por supuesto, no atraviesan las paredes. Pero las ondas de radio sí.
Durante décadas, la identificación por radiofrecuencia (RF) se ha utilizado para rastrear todo tipo de objetos, desde libros de la biblioteca hasta mascotas. Los sistemas de identificación por radiofrecuencia tienen dos componentes principales: un lector y una etiqueta. La etiqueta es un minúsculo chip informático que se adhiere -o, en el caso de las mascotas, se implanta- al objeto que se quiere rastrear. El lector emite una señal de radiofrecuencia que es modulada por la etiqueta y reflejada en el lector.
La señal reflejada proporciona información sobre la ubicación y la identidad del artículo etiquetado. La tecnología ha ganado popularidad en las cadenas de suministro de los comercios minoristas: Japón pretende utilizar el seguimiento por radiofrecuencia para casi todas las compras al por menor en cuestión de años. Los investigadores se dieron cuenta de que esta profusión de RF podría ser una bendición para los robots, ya que les proporcionaría otro modo de percepción.
"La radiofrecuencia es una modalidad de detección diferente a la visión", dice Rodríguez. "Sería un error no explorar lo que la RF puede hacer".
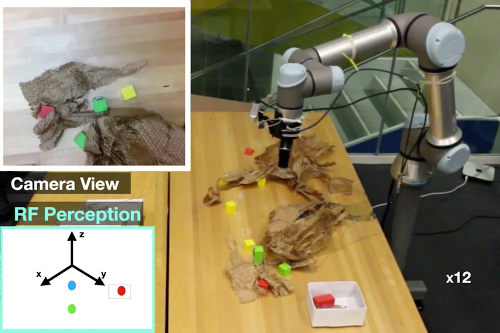
RF Grasp utiliza tanto una cámara como un lector de RF para encontrar y coger objetos etiquetados, incluso cuando están totalmente bloqueados a la vista de la cámara. Consiste en un brazo robótico unido a una mano de sujeción. La cámara se sitúa en la muñeca del robot. El lector de radiofrecuencia es independiente del robot y transmite la información de seguimiento al algoritmo de control del robot. De este modo, el robot recoge constantemente datos de seguimiento por radiofrecuencia y una imagen visual de su entorno. Integrar estos dos flujos de datos en la toma de decisiones del robot fue uno de los mayores retos a los que se enfrentaron los investigadores.
"El robot tiene que decidir, en cada momento, en cuál de estos flujos es más importante pensar", dice Boroushaki. "No se trata sólo de la coordinación ojo-mano, sino de la coordinación RF-ojo-mano. Así que el problema se complica mucho".
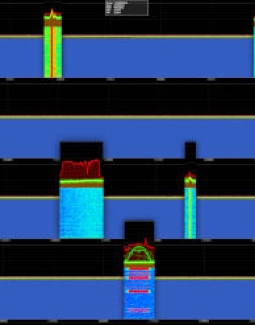
El robot inicia el proceso de búsqueda y captura haciendo sonar la etiqueta de radiofrecuencia del objeto objetivo para saber dónde se encuentra. "Empieza utilizando la RF para centrar la atención de la visión", dice Adib. "Luego se utiliza la visión para realizar maniobras precisas". La secuencia es similar a la de oír una sirena por detrás, y luego girarse para mirar y obtener una imagen más clara de la fuente de la sirena.
Con sus dos sentidos complementarios, RF Grasp se centra en el objeto objetivo. A medida que se acerca e incluso empieza a manipular el objeto, la visión, que proporciona detalles mucho más precisos que la RF, domina la toma de decisiones del robot.
RF Grasp demostró su eficacia en una serie de pruebas. En comparación con un robot similar equipado sólo con una cámara, RF Grasp fue capaz de localizar y sujetar su objeto con la mitad del movimiento total. Además, RF Grasp demostró la capacidad única de "desordenar" su entorno, eliminando los materiales de embalaje y otros obstáculos en su camino para acceder al objetivo. Rodríguez afirma que esto demuestra la "ventaja injusta" de RF Grasp respecto a los robots sin sensores de radiofrecuencia penetrantes. "Tiene esta orientación que otros sistemas simplemente no tienen".
RF Grasp podría un día realizar tareas de logística en almacenes de comercio electrónico repletos. Su detección por RF podría incluso verificar instantáneamente la identidad de un artículo sin necesidad de manipularlo, exponer su código de barras y luego escanearlo. "La radiofrecuencia tiene el potencial de mejorar algunas de las limitaciones de la industria, especialmente en lo que respecta a la percepción y la localización", afirma Rodríguez.
Adib también prevé posibles aplicaciones domésticas para el robot, como localizar la llave Allen adecuada para montar su silla de Ikea. "O se podría imaginar al robot encontrando objetos perdidos. Es como un super-Roomba que va y recupera mis llaves, dondequiera que las haya puesto".
Articulos Electrónica Relacionados
- Resolver los retos de la pizze... Imagine a un pizzero trabajando con una bola de masa. Puede utilizar una espátula para levantar la masa sobre una tabla de cortar y luego utilizar un rodillo pa...
- Nueva Robótica: Modificando mo... Los fabricantes de máquinas en muchos mercados establecidos venden sus máquinas directamente a través de las redes de distribuidores. A veces, crean flujos de i...
- Método que verifica rápidament... Antes de que un robot pueda coger la vajilla de una estantería para poner la mesa, debe asegurarse de que su pinza y su brazo no chocarán contra nada y podrían ...
- Kit de robótica para educación... Farnell element14 distribuye el TI Robotics System Learning Kit (TI-RSLK), un kit de robótica asequible que ofrece a los estudiantes una mejor comprensi&...
- Controlador Omron NJ501-R con ... OMRON Corporation anuncia el lanzamiento del primer «controlador con la robótica integrada». El nuevo controlador NJ501-R se basa en la serie de controladores d...
- Cobot Igus ReBeL con un engran... El nuevo ReBeL de igus es un cobot de plástico de solo 10 kg que hace viables nuevas ideas innovadoras en materia de robótica de servicio para las start-ups y p...
- Plataformas educativas de robó... Premier Farnell ha incorporado a su gama de productos una colección completa de kits educativos de robótica, ofreciendo una plataforma atractiva y accesible par...
- Un delgado dedo robótico detec... Discernir objetos enterrados en material granular como la arena es una tarea más compleja. Para ello, un robot necesitaría unos dedos lo suficientemente finos c...
- Robot para soldadura Thermaltr... El sistema robótico de Thermaltronics incorpora conceptos de diseño innovadores y componentes de precisión para garantizar la precisi&oacut...
- Pinzas personalizables para ro... On Robot presenta su nuevo modelo de pinza flexible y de bajo consumo para cobots encargados de manipular objetos de diferentes tamaños – la RG6.F&...
- Yamaha Motor añade los tipos d... Yamaha Motor Europe Robotics, sección FA, ha anunciado hoy que sus operaciones de robótica han añadido nuevos modelos de tipo barra a la línea de modelos básico...
- Robot colaborativo monobrazo Y... ABB presentará su robot colaborativo de brazo único en la Exposición Internacional de Robótica (iREX) 2017 de Tokio. El robot se lan...