Un delgado dedo robótico detecta objetos enterrados

Discernir objetos enterrados en material granular como la arena es una tarea más compleja. Para ello, un robot necesitaría unos dedos lo suficientemente finos como para penetrar en la arena, lo suficientemente móviles como para soltarse cuando los granos de arena se atasquen y lo suficientemente sensibles como para sentir la forma detallada del objeto enterrado.
Los investigadores del MIT han diseñado un dedo robótico de punta afilada dotado de sensores táctiles para afrontar el reto de identificar objetos enterrados. En los experimentos realizados, el dedo llamado Digger Finger fue capaz de excavar en medios granulares como la arena y el arroz, y detectó correctamente las formas de los objetos sumergidos que encontró. Los investigadores afirman que el robot podría realizar algún día diversas tareas subterráneas, como encontrar cables enterrados o desactivar bombas enterradas.
La investigación se presentará en el próximo Simposio Internacional de Robótica Experimental. El autor principal del estudio es Radhen Patel, postdoctoral del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) del MIT. Entre los coautores se encuentran el estudiante de doctorado del CSAIL Branden Romero, la estudiante de doctorado de la Universidad de Harvard Nancy Ouyang, y Edward Adelson, profesor John y Dorothy Wilson de Ciencias de la Visión en el CSAIL y el Departamento de Ciencias Cognitivas y del Cerebro.
La búsqueda de objetos enterrados en material granular -arena, grava y otros tipos de partículas poco compactas- no es algo nuevo. Anteriormente, los investigadores han utilizado tecnologías que detectan el subsuelo desde arriba, como el radar de penetración en el suelo o las vibraciones ultrasónicas. Pero estas técnicas sólo proporcionan una visión borrosa de los objetos sumergidos. Por ejemplo, tienen dificultades para diferenciar la roca del hueso.
"Así que la idea es hacer un dedo que tenga un buen sentido del tacto y pueda distinguir entre las distintas cosas que está sintiendo", dice Adelson. "Eso sería útil si se trata de encontrar y desactivar bombas enterradas, por ejemplo". Hacer realidad esta idea supuso superar una serie de obstáculos.
El primer reto del equipo fue una cuestión de forma: El dedo robótico tenía que ser delgado y de punta afilada.
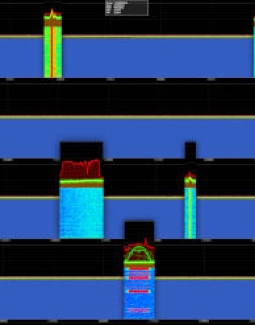
En trabajos anteriores, los investigadores habían utilizado un sensor táctil llamado GelSight. El sensor consistía en un gel transparente recubierto de una membrana reflectante que se deformaba cuando los objetos la presionaban. Detrás de la membrana había tres colores de luces LED y una cámara. Las luces brillaban a través del gel y sobre la membrana, mientras que la cámara recogía el patrón de reflexión de la membrana. Los algoritmos de visión por ordenador extrajeron la forma 3D de la zona de contacto donde el dedo blando tocaba el objeto. El artilugio proporcionaba una excelente sensación de tacto artificial, pero era incómodamente voluminoso.
Para el Digger Finger, los investigadores redujeron su sensor GelSight de dos maneras principales. En primer lugar, cambiaron la forma para que fuera un cilindro delgado con una punta biselada. A continuación, eliminaron dos tercios de las luces LED y utilizaron una combinación de LED azules y pintura fluorescente de colores. "Eso ahorró mucha complejidad y espacio", dice Ouyang. "Así pudimos darle una forma tan compacta". El producto final era un dispositivo cuya membrana de detección táctil medía unos 2 centímetros cuadrados, similar a la punta de un dedo.
Una vez resuelto el problema del tamaño, los investigadores se centraron en el movimiento, montando el dedo en un brazo robótico y excavando en arena de grano fino y arroz de grano grueso. Los medios granulares tienden a atascarse cuando numerosas partículas quedan atrapadas en su lugar. Eso dificulta su penetración. Así que el equipo añadió la vibración a las capacidades del Digger Finger y lo sometió a una serie de pruebas.
"Queríamos ver cómo las vibraciones mecánicas ayudaban a excavar más profundamente y a atravesar los atascos", dice Patel. "Hicimos funcionar el motor vibratorio a diferentes voltajes de funcionamiento, lo que cambia la amplitud y la frecuencia de las vibraciones". Comprobaron que las vibraciones rápidas ayudaban a "fluidificar" el medio, despejando los atascos y permitiendo una excavación más profunda, aunque este efecto fluidificador era más difícil de conseguir en la arena que en el arroz.
También probaron varios movimientos de torsión tanto en el arroz como en la arena. A veces, los granos de cada tipo de medio se atascaban entre la membrana táctil del Digger-Finger y el objeto enterrado que intentaba detectar. Cuando esto ocurría con el arroz, los granos atrapados eran lo suficientemente grandes como para oscurecer completamente la forma del objeto, aunque la oclusión podía eliminarse normalmente con un pequeño movimiento robótico. La arena atrapada fue más difícil de eliminar, aunque el pequeño tamaño de los granos hizo que el Digger Finger pudiera seguir detectando los contornos generales del objeto.
Patel dice que los operadores tendrán que ajustar el patrón de movimiento del Digger Finger para diferentes configuraciones "dependiendo del tipo de medio y del tamaño y la forma de los granos". El equipo tiene previsto seguir explorando nuevos movimientos para optimizar la capacidad del Digger Finger de desplazarse por diversos medios.
Adelson afirma que el Digger Finger forma parte de un programa que amplía los ámbitos en los que se puede utilizar el tacto robótico. Los humanos utilizan sus dedos en entornos complejos, ya sea para buscar una llave en el bolsillo de un pantalón o para palpar un tumor durante una operación. "A medida que mejoramos el tacto artificial, queremos ser capaces de utilizarlo en situaciones en las que se está rodeado de todo tipo de información que distrae", dice Adelson. "Queremos ser capaces de distinguir entre las cosas que son importantes y las que no lo son".
Esta investigación ha sido financiada, en parte, por el Instituto de Investigación Toyota a través del Centro de Investigación Conjunta Toyota-CSAIL, la Oficina de Investigación Naval y el Consejo Noruego de Investigación.
Articulos Electrónica Relacionados
- Robot SCARA "YK400XE" de Yamah... Yamaha Motor Europe Fa Section lanzará el nuevo robot SCARA "YK400 XE" (con una longitud de brazo de 400 mm) el 17 de septiembre de 2019. Este "YK400XE" es un m...
- Un robot que detecta objetos o... En los últimos años, los robots han adquirido visión artificial, tacto e incluso olfato. "Los investigadores han dotado a los robots de una percepción similar a...
- Cobot industrial de 20 kg de c... Universal Robots ha anunciado el lanzamiento de un nuevo cobot de 20 kg de carga. Bajo el nombre UR20, el nuevo cobot cuenta con un diseño nuevo de articulación...
- Robots articulados cartesianos... Los cobots ligeros dominaron en la Hanover Messe de este mes de abril. Si bien ofrecen una visión tentadora para nuestro futuro industrial, muchos de los desafí...
- Controlador Omron NJ501-R con ... OMRON Corporation anuncia el lanzamiento del primer «controlador con la robótica integrada». El nuevo controlador NJ501-R se basa en la serie de controladores d...
- Líder del sector automotriz en... Un productor líder de componentes para automoción ha superado rápidamente sus desafíos de automatización al aprovechar la velocidad y la simplicidad del sistema...
- Nueva Robótica: Modificando mo... Los fabricantes de máquinas en muchos mercados establecidos venden sus máquinas directamente a través de las redes de distribuidores. A veces, crean flujos de i...
- Brazos robóticos para utilizar... RS Components (RS), marca comercial de Electrocomponents plc distribuye los robots de banco de trabajo R12 y R17 de ST Robotics. Fáciles de programar, in...
- Robot Cartesiano de Pórtico, I... I&J Fisnar Inc. les presenta la nueva serie de robots de dosificación tipo Pórtico Cartesianos, más potentes gracias al uso de servomotores; y con un área de tr...
- Una forma más fácil de enseñar... Un robot de almacén recoge tazas de una estantería y las coloca en cajas para su envío. Todo va viento en popa, hasta que el almacén procesa un cambio y el robo...
- Kit Intel IoT RFP para consoli... congatec presenta su nuevo kit de consolidación de carga de trabajo para la conciencia situacional basada en la visión que Intel califica como Intel IoT RFP (Re...
- Elección y uso de robots de un... Un robot industrial puede ser tan sencillo como un robot de un solo eje en lo que se refiere al transporte y el posicionamiento básicos, o puede ampliarse a var...